
It’s now possible for you to build intelligent robots at home using accessible tools and open-source platforms. You no longer need a lab or advanced degree to create machines that learn, adapt, and respond to their environment. With affordable sensors, modular components, and intuitive programming frameworks, you’re equipped to design, test, and refine smart robotic systems that were once limited to research institutions.
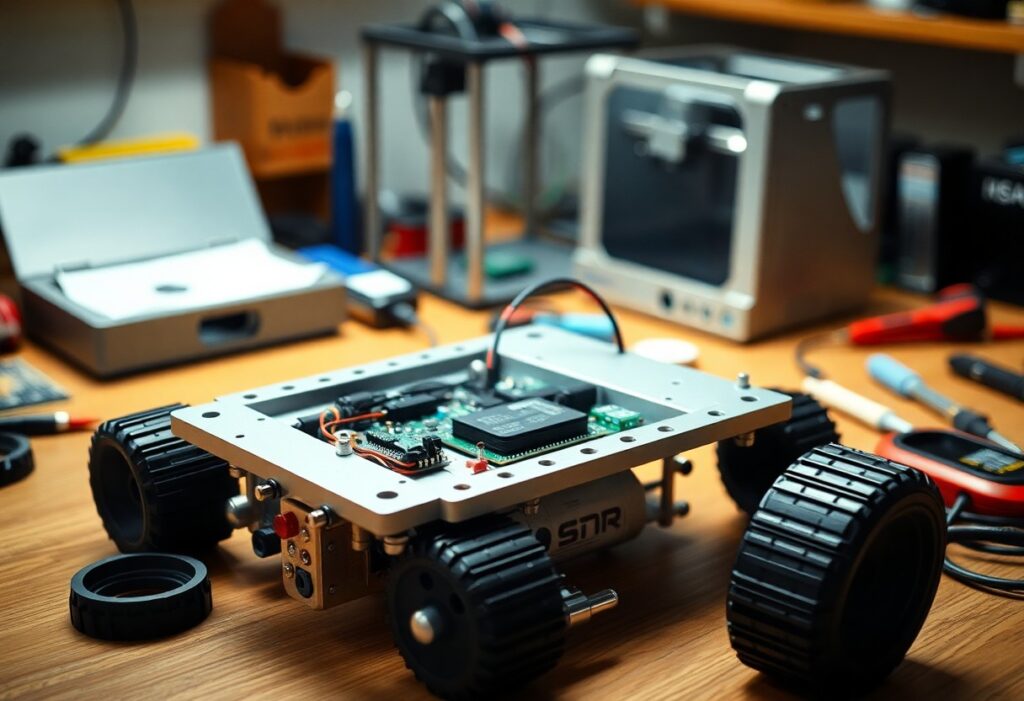
The Positronic Core: Selecting Neural Hardware
Choosing the right neural hardware defines your robot’s ability to learn and react in real time. You need components that balance power efficiency with computational throughput, especially when operating without constant cloud access. Your selection shapes how quickly your robot interprets sensor data, makes decisions, and adapts to new environments-all while fitting within physical and thermal constraints.
Edge Processing Units
Processing data on-device keeps response times low and improves privacy. You avoid relying on distant servers by running inference directly on compact, energy-efficient chips. These units handle vision, audio, and motion tasks locally, enabling your robot to operate reliably even with spotty connectivity. Speed and autonomy start at the edge.
Tensor Processing Integration
Integrating dedicated tensor processors accelerates machine learning workloads dramatically. You gain the ability to run complex neural networks on-device without draining power. These chips are built for the math behind deep learning, letting your robot process images, recognize speech, or predict actions faster and more efficiently than general-purpose CPUs.
Tensor processing units specialize in parallel computation, making them ideal for handling the matrix operations that dominate neural network inference. When you embed these into your robot’s architecture, you enable real-time decision-making with models that would otherwise require a data center. Modern compact TPU modules now fit on single-board systems, giving DIY builders access to performance once limited to large tech labs. Your robot doesn’t just react-it anticipates.
Sensory Synthesis and Environmental Mapping
You integrate multiple sensor inputs to form a coherent understanding of your robot’s surroundings. By fusing data from vision, sound, and spatial sensors, your system builds dynamic maps that adapt in real time. This synthesis allows your robot to interpret complex environments with precision, enabling smarter navigation and interaction.
Advanced Computer Vision
Cameras give your robot the ability to detect objects, read text, and recognize patterns. Modern frameworks let you process images directly on compact hardware, enabling real-time decision-making without cloud dependency. You train models to identify specific features relevant to your robot’s tasks.
- Train models using annotated image datasets
- Deploy lightweight neural networks on edge devices
- Use color and motion detection for object tracking
- Implement depth estimation from stereo vision
| Feature | Benefit |
|---|---|
| Real-time inference | Immediate response to visual input |
| On-device processing | Reduced latency and privacy preservation |
| Pre-trained models | Faster deployment and lower compute needs |
Lidar and Spatial Feedback
Lidar delivers precise distance measurements by scanning surroundings with laser pulses. You use this data to generate high-resolution 3D maps, allowing your robot to detect obstacles and define navigable paths even in low visibility.
Your robot relies on Lidar to maintain spatial awareness in dynamic settings. Each scan produces a point cloud that updates multiple times per second, feeding into SLAM algorithms that track position and map unknown areas simultaneously. This feedback loop ensures accurate localization, especially in featureless or repetitive environments where vision alone falls short.
Behavioral Logic and Heuristic Programming
You define how your robot responds to stimuli by designing rule-based systems that mimic decision-making. These heuristics allow the machine to prioritize actions based on sensor input, enabling basic problem-solving without complex computation. Your logic determines reliability in dynamic environments.
Neural Network Implementation
A neural network gives your robot the ability to learn from data instead of relying solely on predefined rules. By training it on sensor inputs and expected outputs, you enable pattern recognition for tasks like object detection or voice commands. This adaptability improves over time with exposure.
Autonomous Navigation Protocols
Your robot must interpret spatial data to move safely through its environment. Using sensor fusion from cameras and LiDAR, it builds real-time maps and identifies obstacles. These protocols determine path efficiency and responsiveness in cluttered or changing spaces.
Mapping and pathfinding rely on algorithms like A* or Dijkstra’s to calculate optimal routes while avoiding collisions. Your robot updates its trajectory continuously as new sensor data arrives, ensuring consistent progress toward a goal. Implementing timeouts and fallback behaviors prevents infinite loops during unexpected blockages.
The Physical Frame: Actuation and Structural Integrity
Your robot’s frame defines how well it moves and withstands stress. Precision in servo placement ensures clean, repeatable motion, while rigid materials prevent deformation under load. Explore proven techniques at Build your own DIY Robot – Doug Blanding – Medium to refine your build.
Precision Servo Mechanics
Servo alignment directly impacts your robot’s responsiveness and accuracy. Misaligned units cause binding, reducing efficiency and lifespan. You must calibrate each joint carefully, ensuring smooth rotation within specified torque limits. High-quality gears and proper mounting minimize backlash, giving you tighter control over movement patterns critical to complex tasks.
Modular Kinetic Design
Modularity lets you swap limbs or joints without redesigning the entire frame. You gain flexibility in adapting to new challenges, whether adding a gripper or extending a leg. Standardized connectors simplify repairs and upgrades, making your robot truly iterative in function and form.
With modular kinetic design, each component serves a dual role: performing its mechanical function while also acting as a replaceable node in a larger system. You benefit from faster prototyping, as failed parts can be unplugged and substituted without disassembling the core structure. This approach mirrors biological systems, where redundancy and adaptability ensure resilience under changing conditions.
Energy Reserves and Sustained Operation
Your robot’s endurance hinges on how efficiently it manages stored energy. Long-term autonomy isn’t just about battery size-it’s about smart power distribution, low-consumption components, and the ability to adapt operation intensity based on remaining reserves. You’ll need systems that anticipate demand, not just react to it.
High-Density Power Storage
Power density defines how much energy fits in limited space. You’re working with compact builds, so every cubic millimeter counts. Modern lithium-polymer and emerging solid-state cells offer high capacity without excess weight, letting your robot run longer without sacrificing mobility or design integrity.
Thermal Regulation Systems
Heat builds quickly in tightly packed circuits and motors. You must manage temperature to prevent performance throttling or component damage. Passive heatsinks, micro-fans, or phase-change materials help maintain safe operating ranges during extended tasks.
Thermal regulation isn’t just about cooling-it’s about balance. You’re dealing with fluctuating loads that generate uneven heat across processors, batteries, and actuators. By integrating temperature sensors with dynamic response mechanisms, your robot can redirect power, adjust motor duty cycles, or activate micro-ventilation only when needed, preserving both energy and hardware longevity over hours of continuous operation.
The Three Laws: Safety and Logic Constraints
You build intelligent robots not just to perform tasks but to coexist safely with humans. Embedding foundational safety rules into their core logic ensures decisions align with human well-being, preventing unintended harm through predictable, rule-bound behavior.
Hardwired Ethical Overrides
Every DIY robot you design must include unchangeable ethical directives that take precedence over user commands. These embedded rules prevent misuse and ensure the machine refuses actions that could endanger people, even if instructed otherwise.
Emergency Shutdown Procedures
A physical kill switch gives you immediate control when software responses fail. This direct hardware interrupt cuts power to motors and processors, ensuring the robot stops all activity the moment a threat emerges.
When sensors detect anomalies beyond normal operation-like unexpected force or overheating-your robot should trigger an automated shutdown sequence. This response works alongside manual controls, offering layered protection. You can program it to log the event for review, helping refine future behavior while maintaining safety as the top priority.
Conclusion
Taking this into account, you shape the future of DIY robotics by blending accessible tools with intelligent design. Your hands build more than machines-they create learning, innovation, and autonomy. Every circuit, code line, and sensor choice advances a new era where intelligent robots are not just owned, but understood and improved by you.


