

With millions of years of evolutionary refinement, nature offers proven solutions to movement, sensing, and adaptation that you can apply directly to robotics. By observing animals, insects, and natural systems, you design machines that walk like insects, fly like birds, or grip like plant tendrils-achieving efficiency and functionality that traditional engineering often misses. The Biological […]
Category: Technology Ethics

How to Build a Self-Balancing Robot from Scratch
Most self-balancing robots rely on precise sensor feedback and real-time control, and you can build one using an Arduino, a motor driver, MPU-6050 gyroscope, and DC motors. With basic coding and electronics skills, you’ll assemble and program a robot that maintains balance on two wheels by continuously adjusting motor output based on tilt data. Essential […]
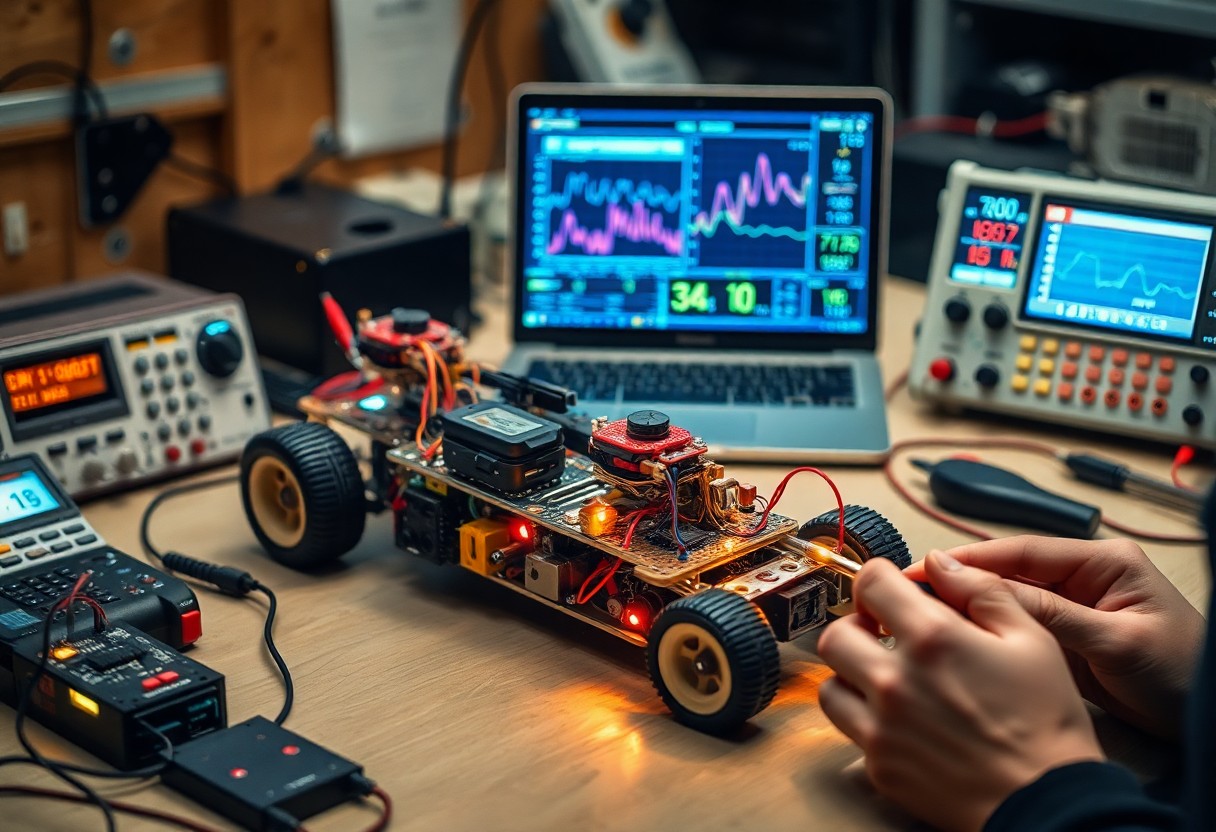
Constructing a Robot with Remote Monitoring and Telemetry
Most robotics projects fail because they lack real-time feedback and remote oversight. You can avoid this by integrating telemetry and remote monitoring from the start. These systems let you track performance, diagnose issues, and adjust operations from a distance, ensuring reliability and precision in dynamic environments. The Frame and the Motor Your robot’s frame sets […]

Constructing a Robot with Autonomous Mapping Capabilities
Many robotics enthusiasts aim to build machines that perceive and move through environments without human guidance. You can construct a robot with autonomous mapping capabilities using sensors like LiDAR or depth cameras, paired with SLAM algorithms. This guide walks you through the core components, software frameworks, and integration steps to bring your intelligent robot to […]
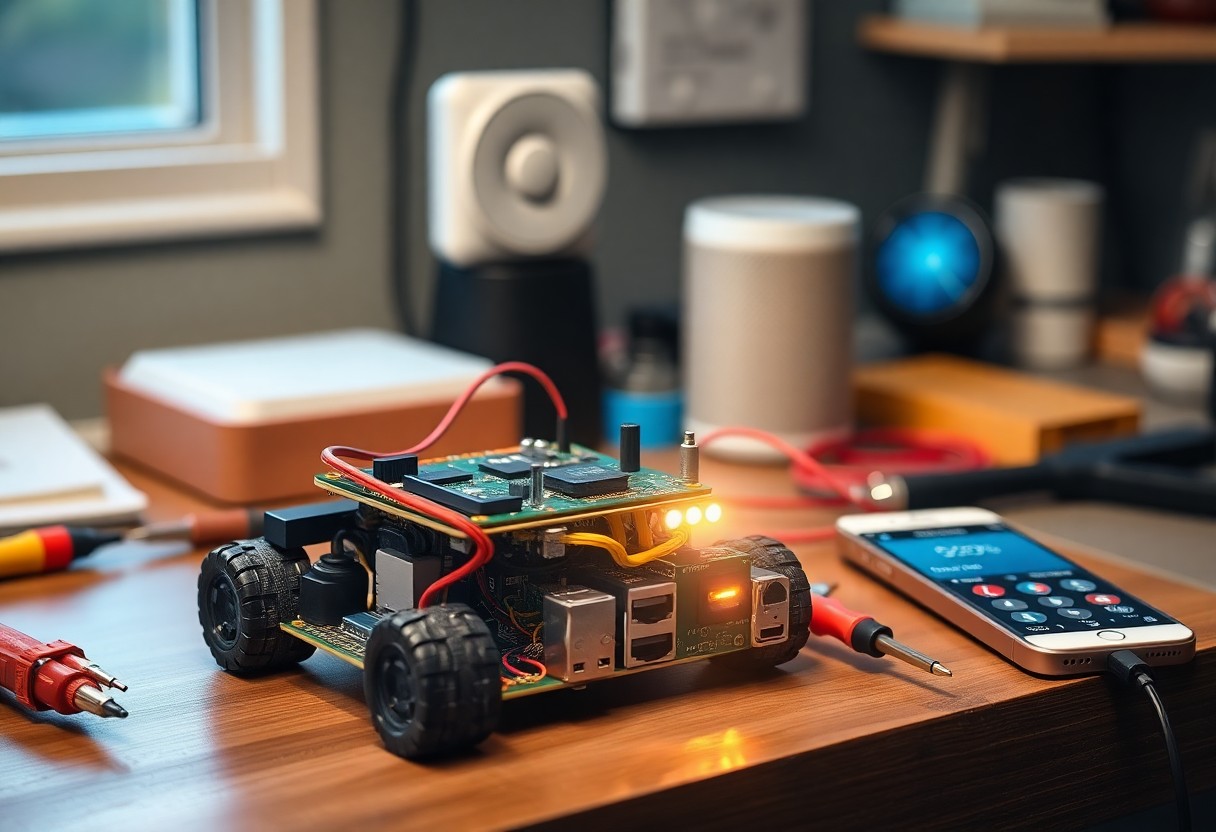
How to Build a Robot for Smart Home Integration
Integration of robotics into your home starts with understanding how devices communicate. You choose components that support common protocols like Wi-Fi or Zigbee. You design the robot’s function around tasks such as monitoring or object transport. You program it to respond to voice commands or sensor input. You test connectivity with existing smart systems to […]

How to Build a Humanoid Robot Prototype
Over the past decade, humanoid robotics has moved from research labs to accessible DIY projects. You can build your own functional prototype by selecting the right frame materials, integrating servo motors for joint movement, programming basic locomotion, and using sensors for environmental awareness. This guide walks you through each step with precision and clarity. Assessing […]

Building a Smart Robot with AI and Computer Vision
With advances in artificial intelligence and computer vision, you can now build a smart robot that perceives and reacts to its environment in real time. By integrating sensors, cameras, and machine learning models, you enable your robot to identify objects, make decisions, and perform complex tasks autonomously. The Positronic Foundation You build intelligence not from […]
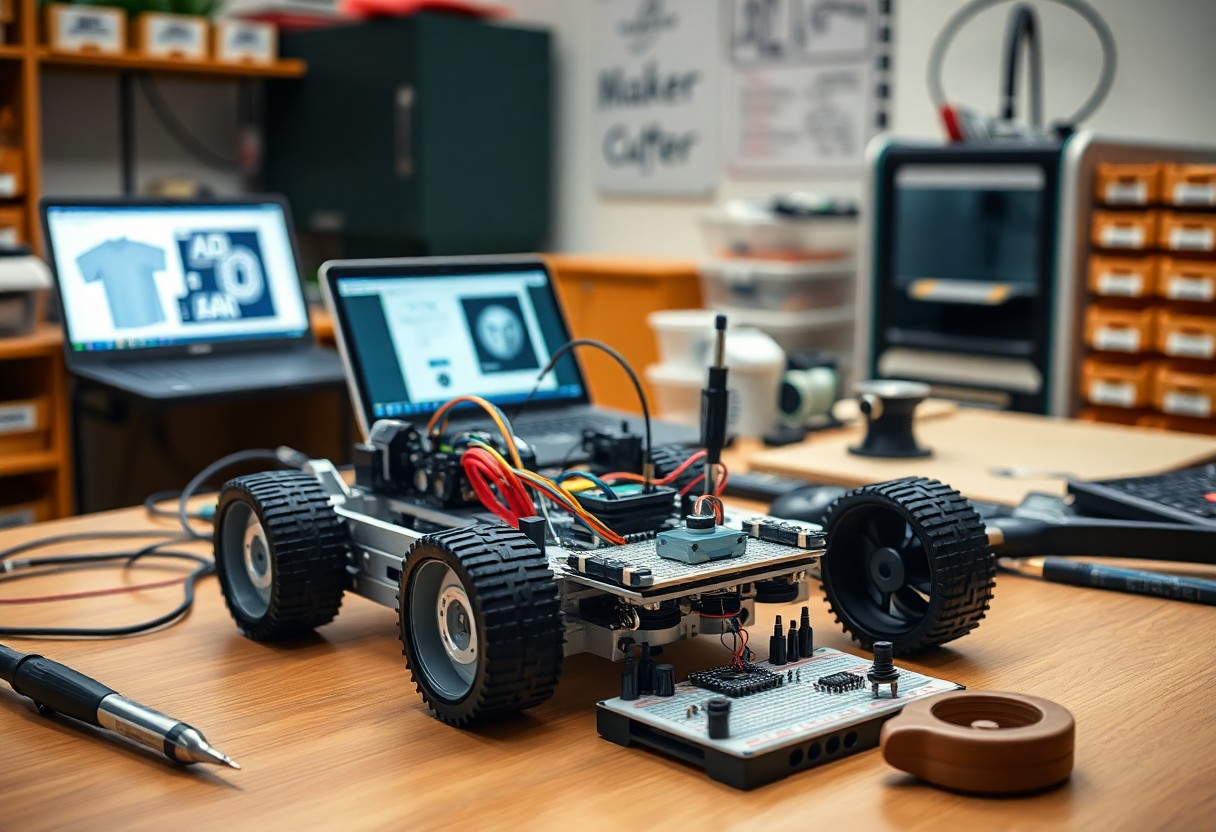
Constructing Robots for Educational Engineering Projects
With step-by-step plans and focused material lists, you build classroom robots that teach mechanics, electronics, and programming, assess student learning, and scale project complexity for different grade levels. Fundamental Design Principles Design clear constraints, modular components, and accessible documentation so you can scope projects that teach systems thinking while matching student skill levels and available […]
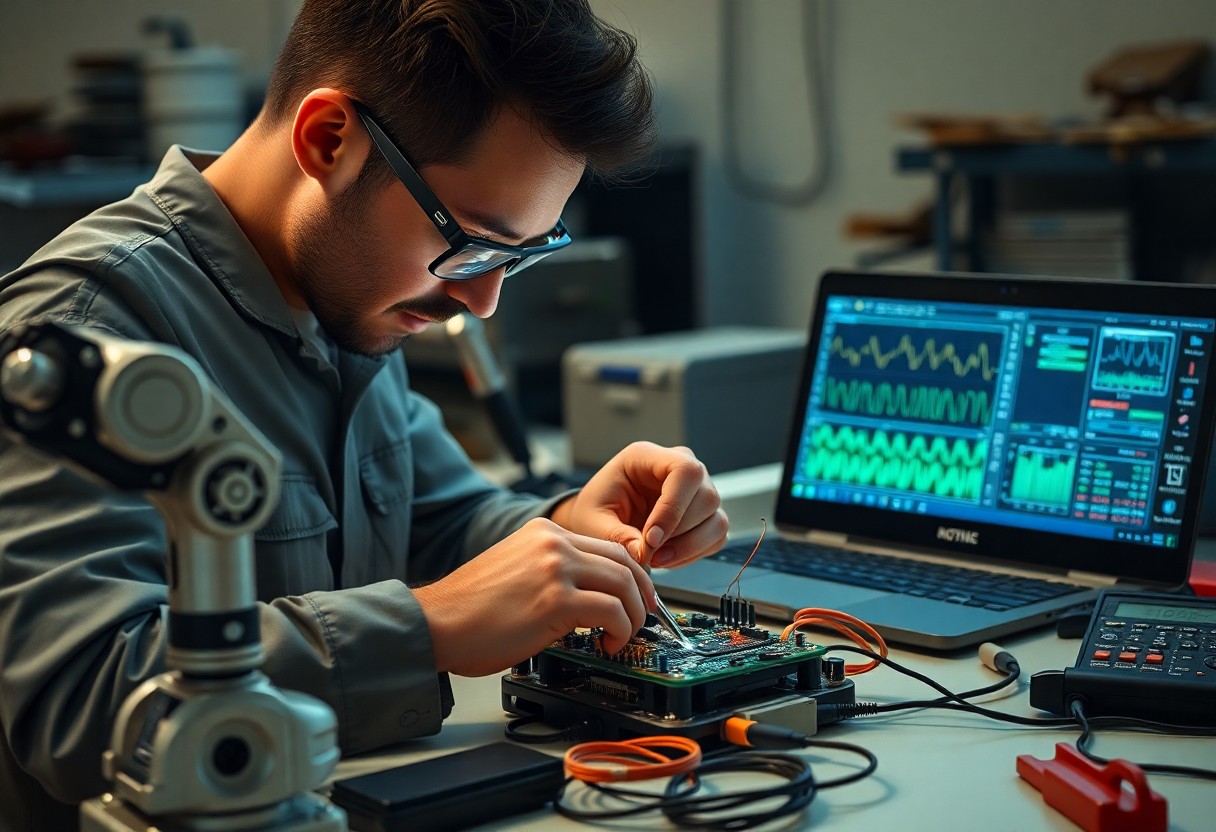
Building a Robot with Real-Time Control Systems
With real-time scheduling and tight sensor-actuator integration, you learn to design deterministic control loops, handle interrupts, and verify timing to guarantee safe, reliable robot behavior. Hardware Architecture for Real-Time Performance Hardware choices determine latency and determinism; you should partition compute, I/O, and power to meet deadlines, using dedicated processors for safety-critical loops and real-time OS […]
Building a Robot with Expandable Hardware Architecture
It’s wise to design modular interfaces, standardized mounts, and flexible power and communication buses so you can add sensors, actuators, and controllers without redesigning the core chassis. Core System Backbone and Power Distribution Backbone systems should prioritize scalable bus architectures and centralized power management so you can expand modules without rework. Plan high-current traces, common […]