

With millions of years of evolutionary refinement, nature offers proven solutions to movement, sensing, and adaptation that you can apply directly to robotics. By observing animals, insects, and natural systems, you design machines that walk like insects, fly like birds, or grip like plant tendrils-achieving efficiency and functionality that traditional engineering often misses. The Biological […]
Category: Business
Building Robots with Open-Source AI Frameworks
OpenSource AI frameworks give you direct access to powerful tools that accelerate robot development. You can modify code, integrate sensors, and train models without licensing barriers. Platforms like TensorFlow, PyTorch, and ROS work together to turn ideas into functional robots faster and more transparently than ever. The Selection of Iron and Silicon You choose materials […]
Constructing Robots with Scalable Modular Architectures
Architecture defines how components integrate and evolve in robotic systems. You design scalable modular robots by standardizing interfaces, enabling plug-and-play functionality across configurations. This approach simplifies upgrades, repairs, and adaptation to new tasks. You gain flexibility without sacrificing performance, making modular design a practical foundation for next-generation robotics. The Modular Premise You design systems where […]

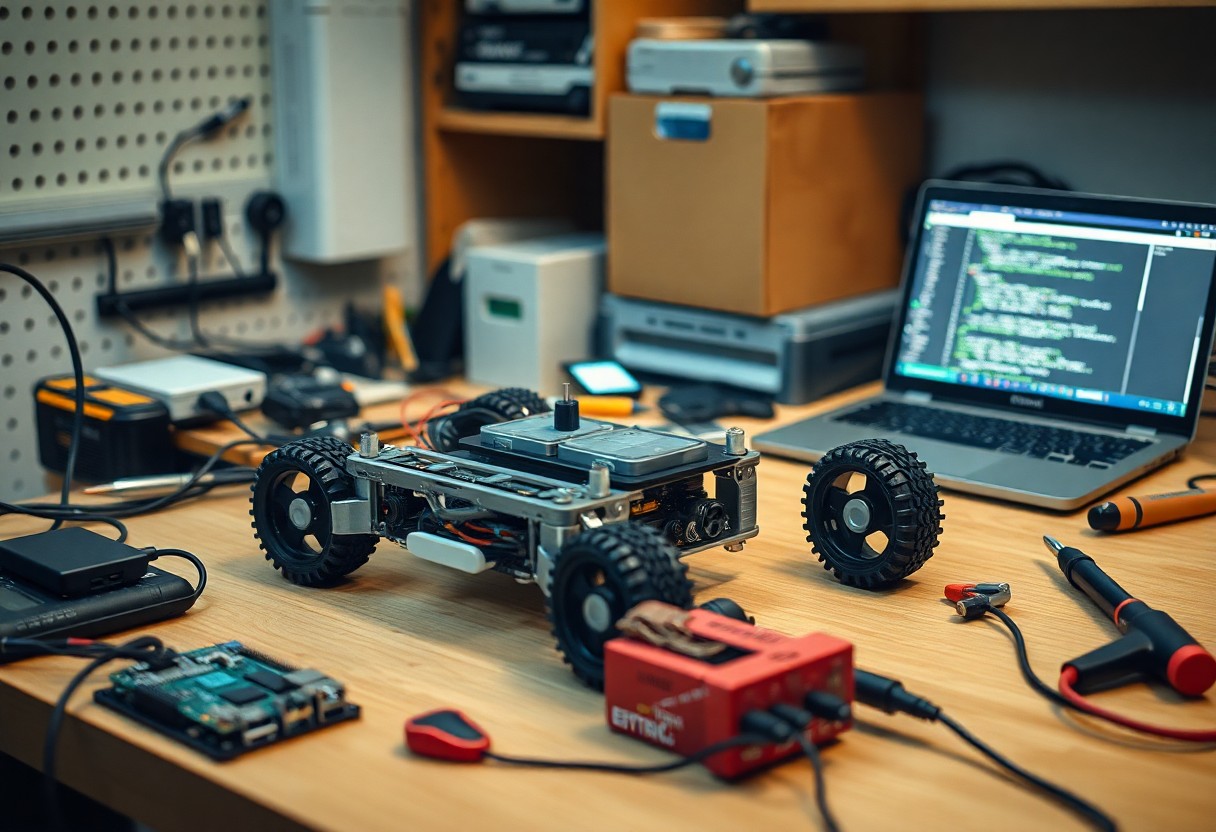
Building a Multi-Purpose Robot for Everyday Tasks
Just imagine a robot that handles chores, assists with errands, and adapts to your daily needs. You can design such a system by integrating modular hardware, responsive sensors, and intuitive software. This guide walks you through the practical steps to build a functional, multi-purpose robot that simplifies everyday life. The Physical Framework Your robot’s durability […]

Constructing a Robot from Concept to Functional Prototype
Just follow systematic design, component selection, prototyping, and testing to transform your robot idea into a working prototype. Conceptualization and Requirements Analysis Conceptualization connects user needs to measurable goals, so you outline core functions, user scenarios, and constraints that will steer design decisions and early trade-offs. Defining Operational Objectives and Constraints Objectives specify mission profiles, […]

Constructing a Robot for Research and Experimentation
Many research teams construct modular robots so you can test sensors, algorithms, and controls; plan hardware, software, safety, and repeatable experiments to gather valid data. Conceptual Design and Research Objectives Clarify the project’s research goals so you can align design choices, sensor suites, and experimental metrics with measurable outcomes. Defining Functional Specifications Specify performance targets, […]

Scaling a Prototype into a Production-Ready Robot
Over iterations, you refine hardware, harden software, standardize assembly, optimize supply chains, and validate safety to transition a prototype into a production-ready robot. Hardware Hardening and Design for Manufacturability Hardware testing reveals failure modes you must address early: shock, moisture, EMI, and thermal cycling; update enclosures, connectors, and PCB coatings to meet field longevity requirements […]

Designing Robots for Easy Maintenance and Repair
It’s imperative you design modular access panels, standardized fasteners, clear diagnostics, and accessible components so you can quickly troubleshoot, replace parts, and minimize downtime without compromising safety. Principles of Modular Architecture Modularity lets you replace or upgrade entire robot sections quickly by using uniform connection points, reducing diagnostic time and simplifying spare inventories. Standardization of […]
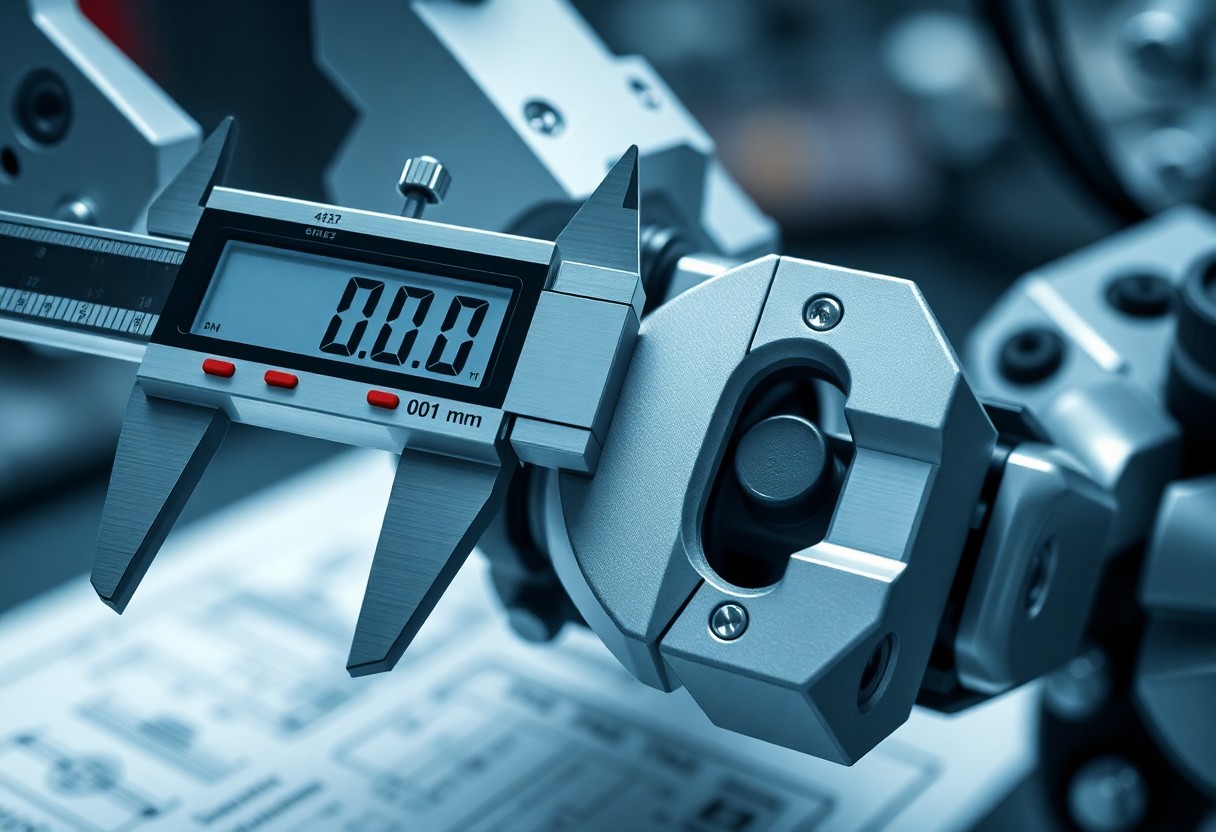
Assembly Tolerances and Their Impact on Robot Accuracy
Just consider how micrometer-level misalignments alter kinematics and repeatability; you must specify tight assembly tolerances, inspect fits, and control stack-up to prevent cumulative positional errors that degrade robot accuracy. Fundamentals of Geometric Dimensioning and Tolerancing (GD&T) GD&T guides you in specifying allowable variation, defining form, orientation, and position controls that determine assembly fits and robot […]

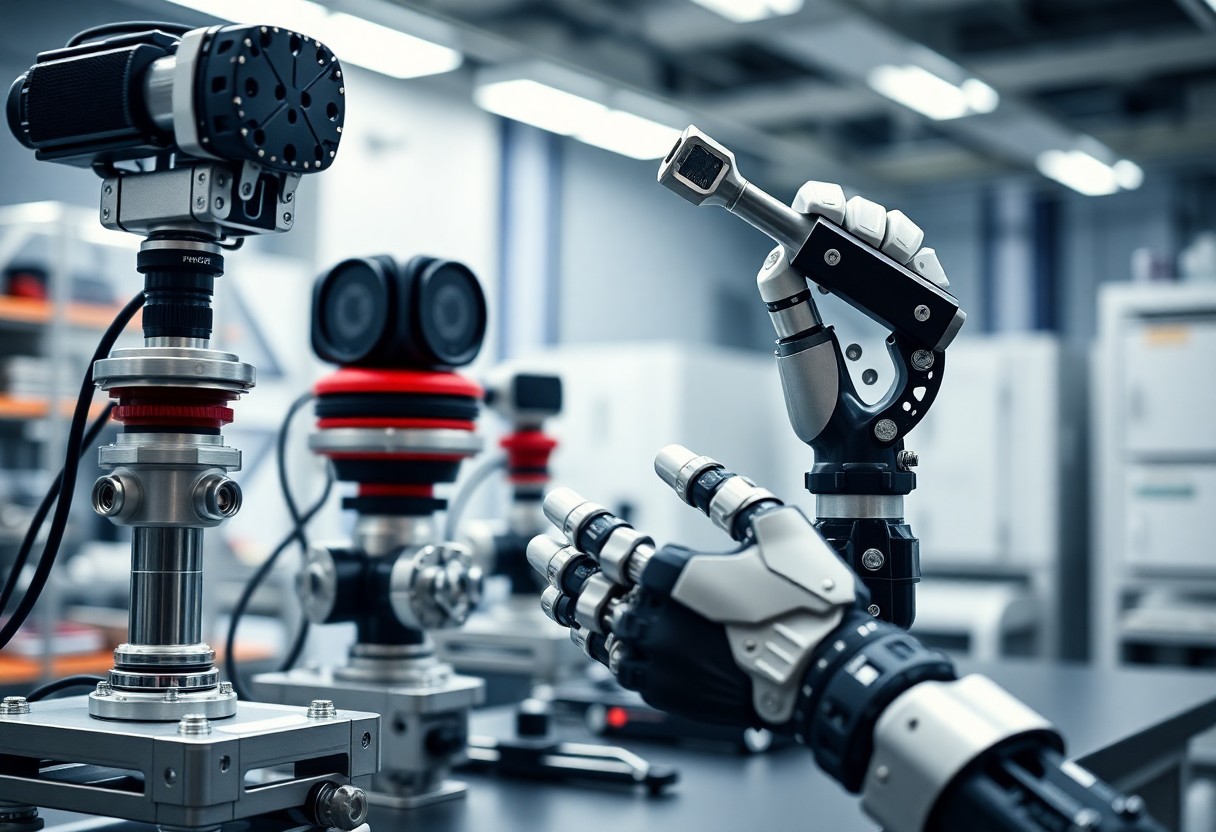
Constructing a Robot Arm – Kinematics and Assembly
You design link lengths and joint angles to achieve precise kinematics, while assembling motors, sensors, and fasteners with care; accuracy drives performance, sharp pinch points present danger, and servo torque enables strong, repeatable motion. Mechanical Design and Component Selection You should match structural requirements, actuator specifications, and safety margins when choosing parts; prioritize load capacity […]