

You operate in a world where supply lines are no longer just guarded but self-repairing, where drones evacuate the injured without waiting for orders, and where battlefield decisions unfold faster than human reflexes allow. Autonomous combat support systems are no longer speculative-they are active participants in modern defense, reshaping how missions are sustained and executed […]
Category: Automation

Here are 20 neutral, news-style headline ideas focused on the role of robots and autonomous systems in the war in Ukraine –
There’s growing evidence that drones, ground robots, and automated systems are reshaping battlefield dynamics in Ukraine. You’re now seeing machines perform reconnaissance, deliver supplies, and even engage targets with increasing frequency. These tools are no longer futuristic concepts but operational assets used by both sides in real-time combat scenarios. The Sky Above Robots in the […]

Constructing Robots Inspired by Nature and Biomimicry
With millions of years of evolutionary refinement, nature offers proven solutions to movement, sensing, and adaptation that you can apply directly to robotics. By observing animals, insects, and natural systems, you design machines that walk like insects, fly like birds, or grip like plant tendrils-achieving efficiency and functionality that traditional engineering often misses. The Biological […]
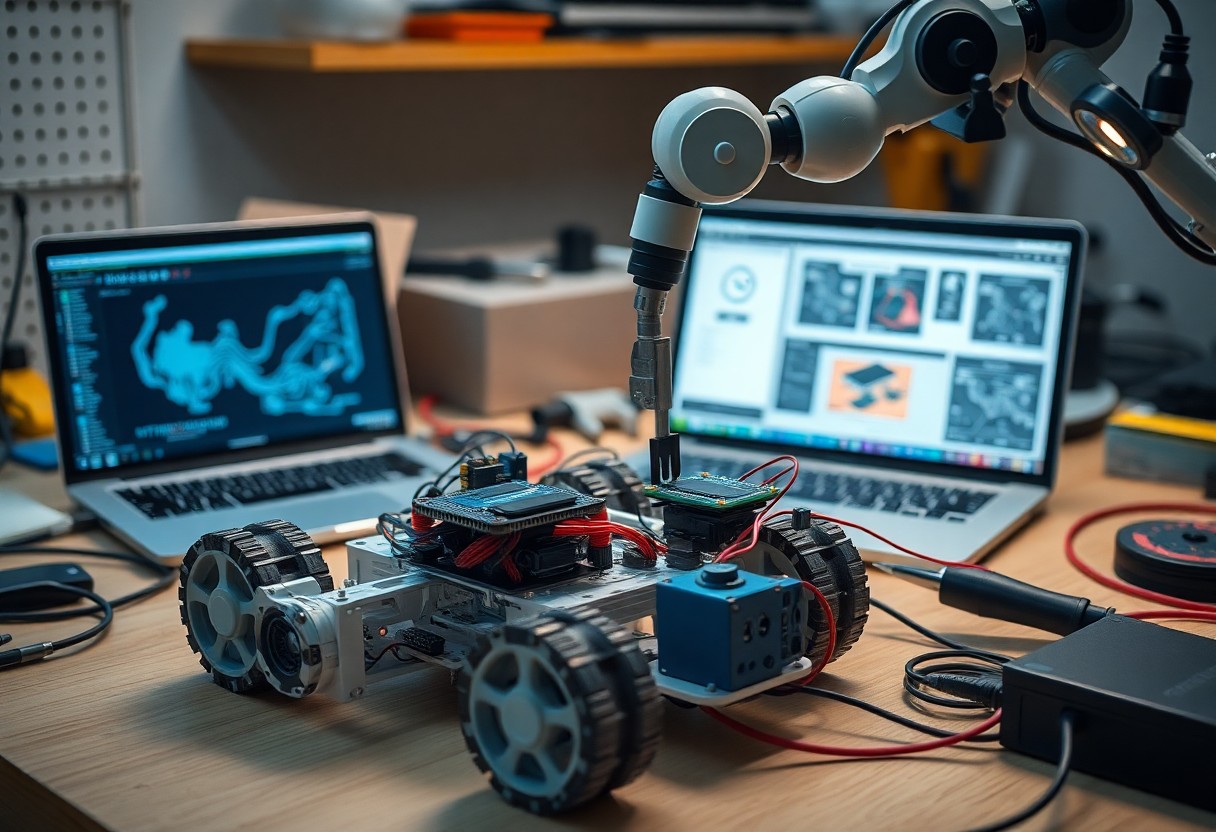
Constructing DIY Robots with AI-Powered Automation
AI enables you to build functional robots at home using accessible tools and smart programming. You can integrate sensors, microcontrollers, and machine learning models to create machines that learn and adapt. This guide shows you how to design, assemble, and automate your own intelligent robots with practical, step-by-step methods. The Silicon Cerebrum Your robot’s intelligence […]

Building a Robot That Can Operate in Extreme Conditions
Most extreme environments demand robots built beyond standard limits. You face intense heat, freezing cold, radiation, or crushing pressure. Success means selecting materials, power sources, and sensors engineered to endure. Every component must perform reliably where humans cannot survive. This is how you build a robot for the planet’s harshest places. The Architecture of Endurance […]

Constructing a Robot Capable of Object Recognition
Construction of a robot capable of object recognition begins with integrating sensors, processing units, and machine learning models. You select cameras and depth sensors to capture visual data, then process it using trained neural networks to identify objects. Proper calibration and iterative testing ensure accuracy and responsiveness in real-world environments. The Mechanical Foundation Your robot […]

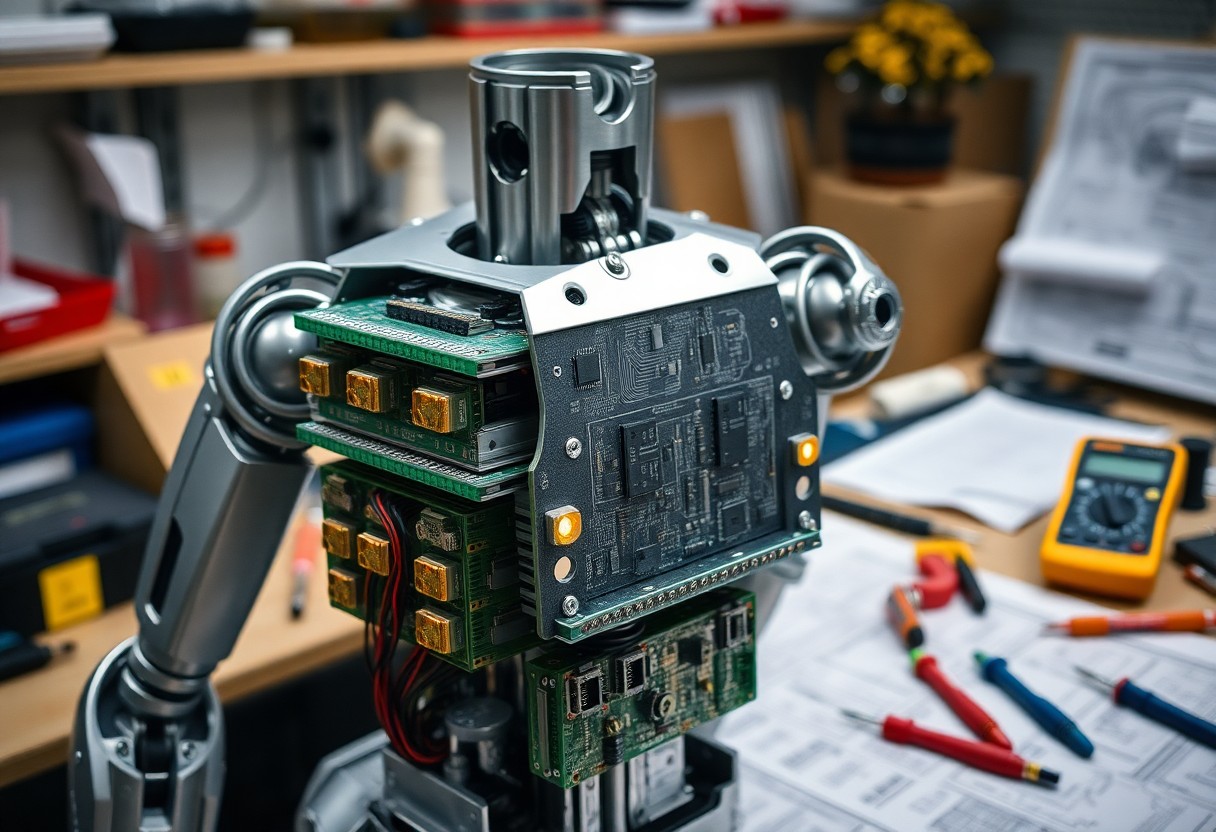
How to Build a Humanoid Robot Prototype
Over the past decade, humanoid robotics has moved from research labs to accessible DIY projects. You can build your own functional prototype by selecting the right frame materials, integrating servo motors for joint movement, programming basic locomotion, and using sensors for environmental awareness. This guide walks you through each step with precision and clarity. Assessing […]

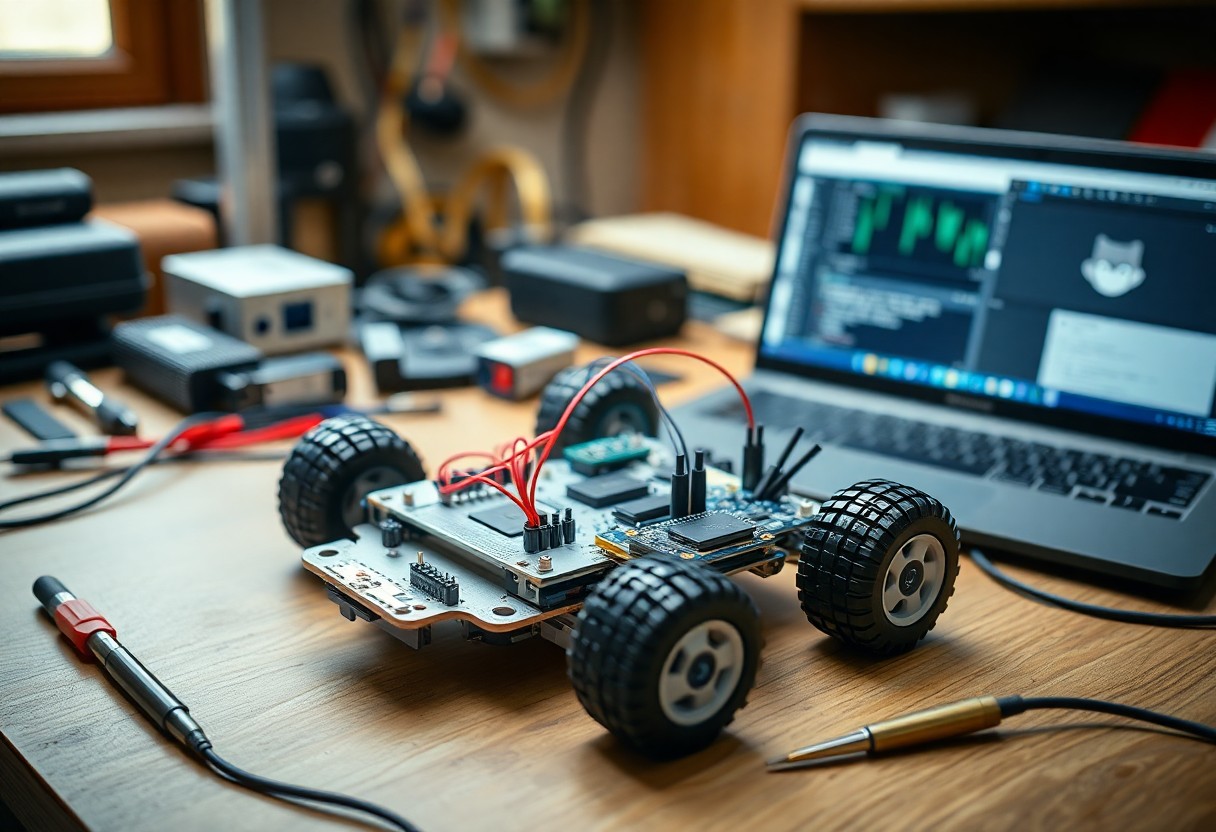
Constructing Robots with Low-Cost Components and High Flexibility
Most robotics enthusiasts begin with limited budgets but big ambitions. You can build functional, adaptable robots using affordable, widely available parts without sacrificing performance. This guide shows you how to select components, design flexible systems, and implement smart engineering choices that maximize capability while minimizing cost. The Economic Imperative of the Machine You build smarter […]
How to Construct a Robot Using Open-Source Hardware
There’s a straightforward way to build your own robot using open-source hardware. You can access affordable, customizable components and detailed schematics online. With basic tools and clear instructions, you assemble, program, and test your robot efficiently. This guide walks you through each step with precision and clarity. Selecting the Right Open-Source Platform Choosing the right […]
Constructing a Robot with Modular Electronics Architecture
Most builders use modular electronics so you can isolate sensors, actuators, and controllers, swap components, test subsystems, and scale functionality without redesigning the entire robot. Foundations of Modular System Design Modularity lets you split control, power, and sensing into discrete boards and connectors so upgrades and repairs target single modules without reworking the entire robot. […]