

It’s clear that the battlefields of Ukraine have become a proving ground for military robotics, where your assumptions about autonomy and combat effectiveness are tested daily. Drone swarms intercept artillery, AI-guided systems track movements in real time, and low-cost platforms challenge billion-dollar tanks. What unfolds is not theoretical-it’s operational reality, reshaping how forces integrate machines […]
Category: Ethics in Technology

Ground Robotics and the Changing Nature of Modern Conflict
Robotics is reshaping how you perceive warfare, replacing human soldiers with machines in increasingly complex combat roles. From reconnaissance to direct engagement, unmanned ground systems are no longer experimental tools but operational realities. You now face a battlefield where algorithms guide movement, explosives are delivered without a human trigger finger, and missions unfold with minimal […]

Constructing Robots Inspired by Nature and Biomimicry
With millions of years of evolutionary refinement, nature offers proven solutions to movement, sensing, and adaptation that you can apply directly to robotics. By observing animals, insects, and natural systems, you design machines that walk like insects, fly like birds, or grip like plant tendrils-achieving efficiency and functionality that traditional engineering often misses. The Biological […]
Constructing Robots with Scalable Modular Architectures
Architecture defines how components integrate and evolve in robotic systems. You design scalable modular robots by standardizing interfaces, enabling plug-and-play functionality across configurations. This approach simplifies upgrades, repairs, and adaptation to new tasks. You gain flexibility without sacrificing performance, making modular design a practical foundation for next-generation robotics. The Modular Premise You design systems where […]
How to Build a Voice-Controlled Robot at Home
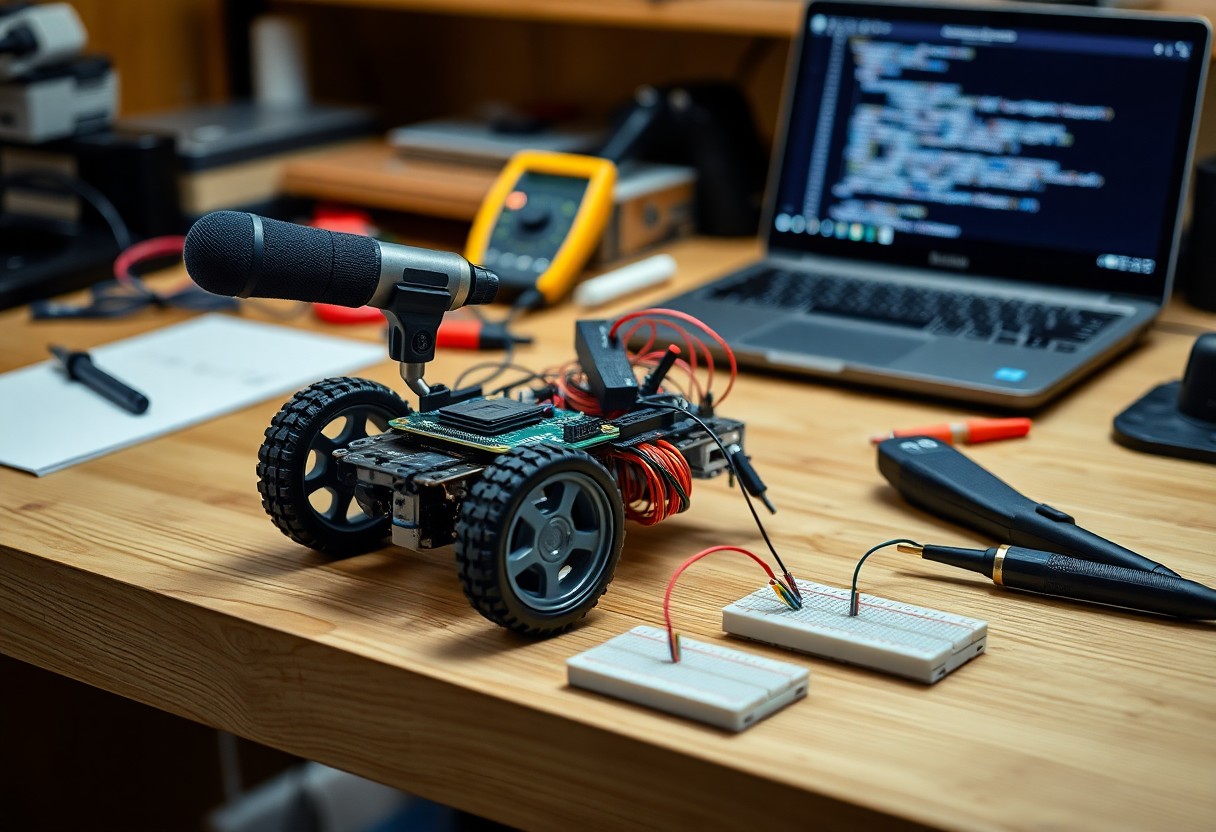
This guide shows you how to build a voice-controlled robot at home using affordable, easy-to-find components. You’ll learn to connect a microcontroller, motor driver, and microphone module, then program the system to respond to spoken commands. With clear steps and no prior robotics experience required, you’ll have a working voice-activated robot in hours. Assessing Core […]

Constructing a Robot That Learns from Human Input
Human feedback shapes how machines adapt and improve over time. You can build a robot that interprets gestures, voice commands, or corrections to refine its actions. By integrating learning algorithms with real-time input, you create systems that grow more accurate and responsive through direct interaction, transforming how robots understand and assist in everyday tasks. The […]

Building a Smart Robot with AI and Computer Vision
With advances in artificial intelligence and computer vision, you can now build a smart robot that perceives and reacts to its environment in real time. By integrating sensors, cameras, and machine learning models, you enable your robot to identify objects, make decisions, and perform complex tasks autonomously. The Positronic Foundation You build intelligence not from […]
How to Construct a Robot Using Open-Source Hardware
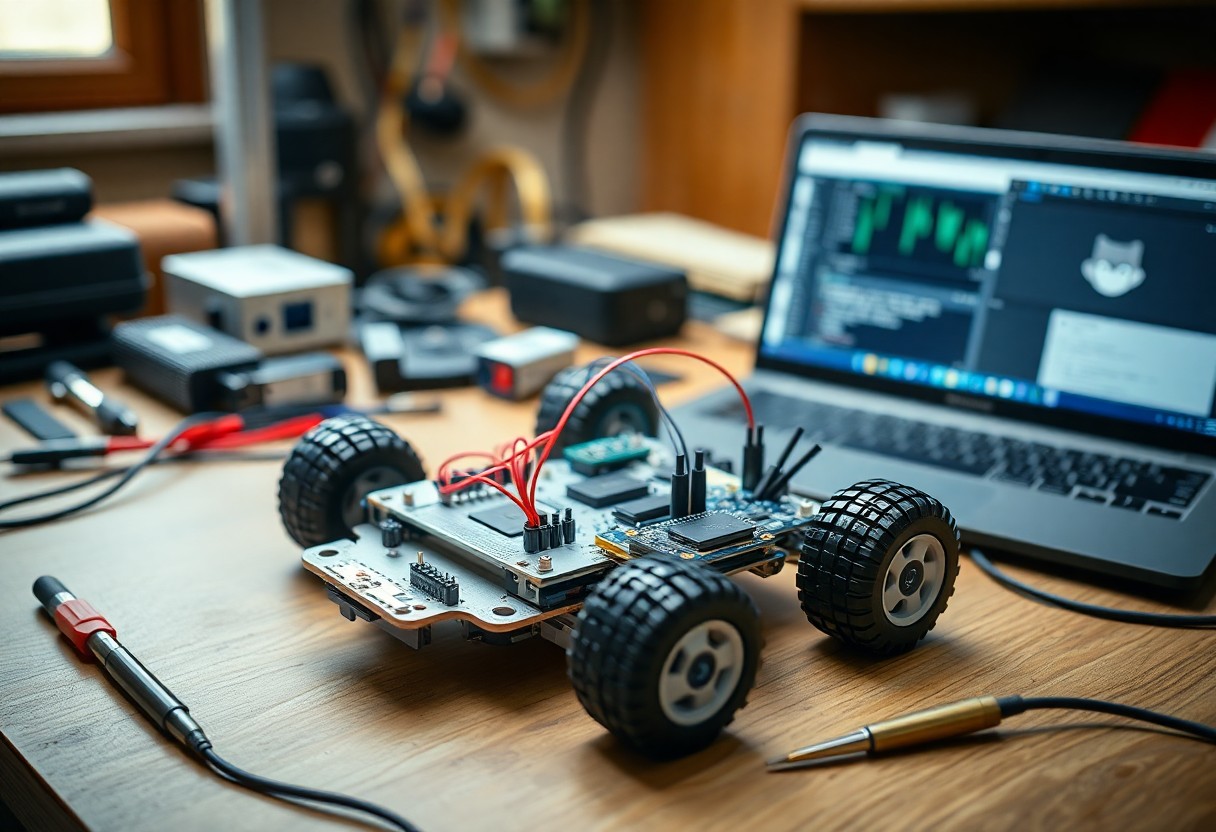
There’s a straightforward way to build your own robot using open-source hardware. You can access affordable, customizable components and detailed schematics online. With basic tools and clear instructions, you assemble, program, and test your robot efficiently. This guide walks you through each step with precision and clarity. Selecting the Right Open-Source Platform Choosing the right […]
Designing and Building a Robot for Autonomous Mapping
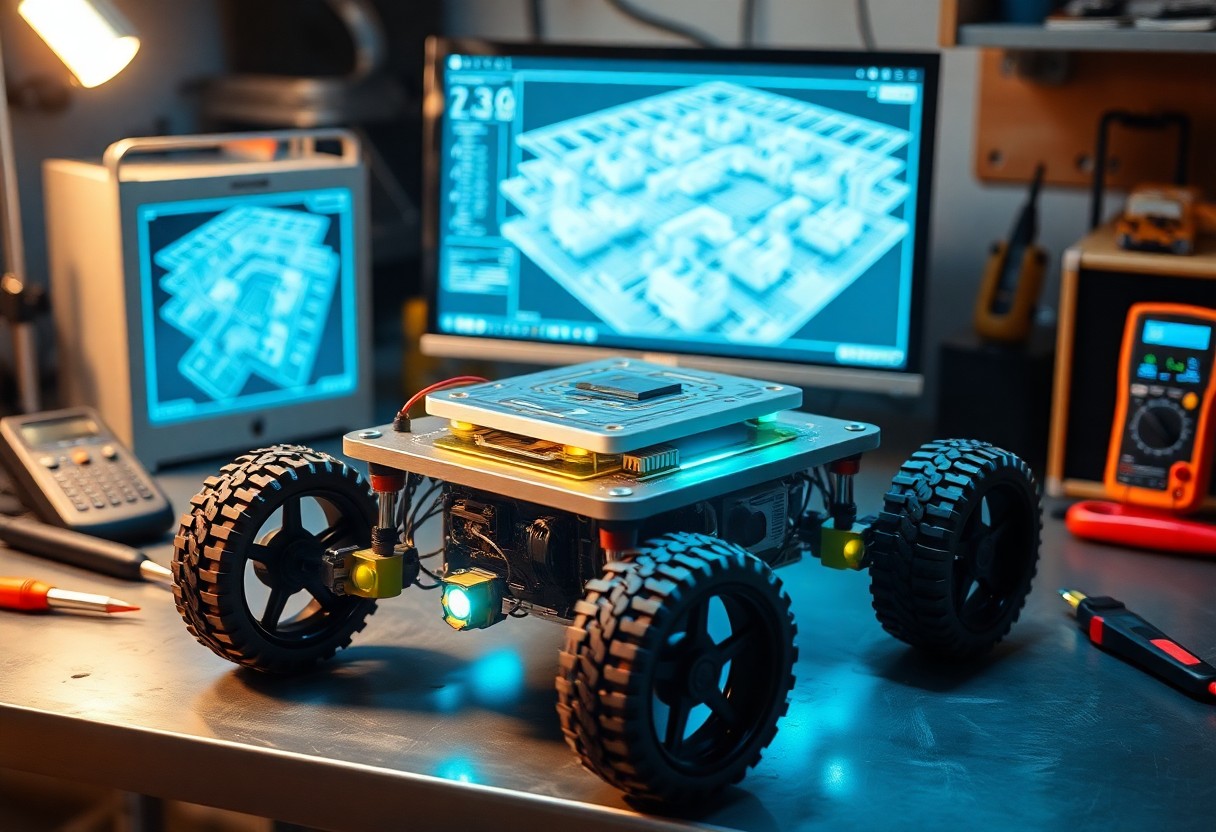
Just define sensor choices, SLAM algorithms, chassis, and power requirements so you can design and build an autonomous mapping robot that produces accurate maps, maintains localization, and operates safely during field testing. Hardware Architecture and Component Selection Your hardware design balances processing, power, and payload constraints; choose a modular chassis, scalable compute (embedded GPU or […]
Building Your Own Autonomous Robot Platform
Just plan sensors, actuators, control systems, and power; design hardware, implement perception and motion-planning software, and rigorously test so you can build a dependable autonomous robot platform. Selecting the Mechanical Chassis and Locomotion Chassis selection balances weight, payload, ground clearance, modular mounting, and sensor placement; you must match frame stiffness to actuator loads and plan […]