

With millions of years of evolutionary refinement, nature offers proven solutions to movement, sensing, and adaptation that you can apply directly to robotics. By observing animals, insects, and natural systems, you design machines that walk like insects, fly like birds, or grip like plant tendrils-achieving efficiency and functionality that traditional engineering often misses. The Biological […]
Category: Daily Life
Building Robots with Open-Source AI Frameworks
OpenSource AI frameworks give you direct access to powerful tools that accelerate robot development. You can modify code, integrate sensors, and train models without licensing barriers. Platforms like TensorFlow, PyTorch, and ROS work together to turn ideas into functional robots faster and more transparently than ever. The Selection of Iron and Silicon You choose materials […]
Constructing the Next Generation of DIY Intelligent Robots
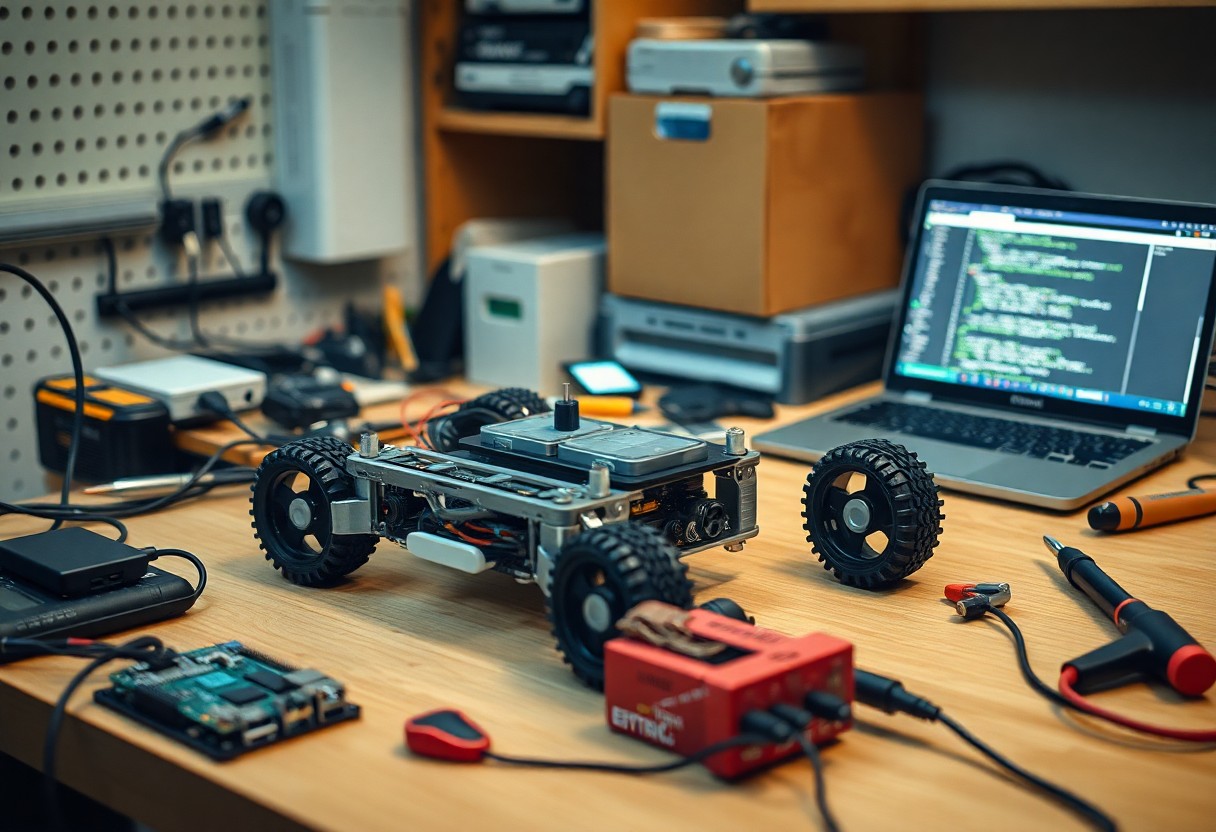
It’s now possible for you to build intelligent robots at home using accessible tools and open-source platforms. You no longer need a lab or advanced degree to create machines that learn, adapt, and respond to their environment. With affordable sensors, modular components, and intuitive programming frameworks, you’re equipped to design, test, and refine smart robotic […]
How to Build a Robot That Interacts with Humans Naturally
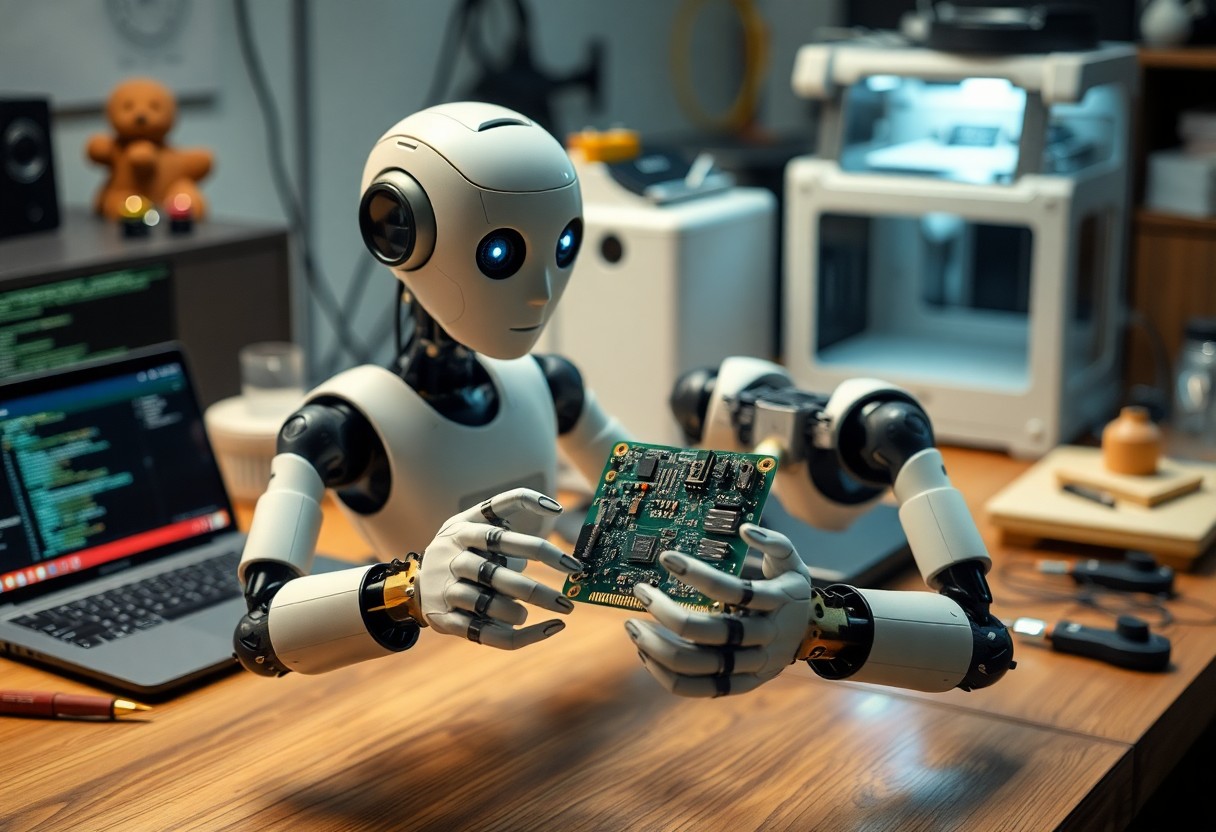
Robot interaction begins with understanding human cues. You design sensors to detect speech, facial expressions, and gestures. You integrate natural language processing and machine learning to interpret intent. You refine responses through real-world feedback. Your robot learns to respond in ways that feel intuitive, building trust and clarity in everyday environments. Identifying Key Factors for […]
How to Build a Robot for Smart Home Integration
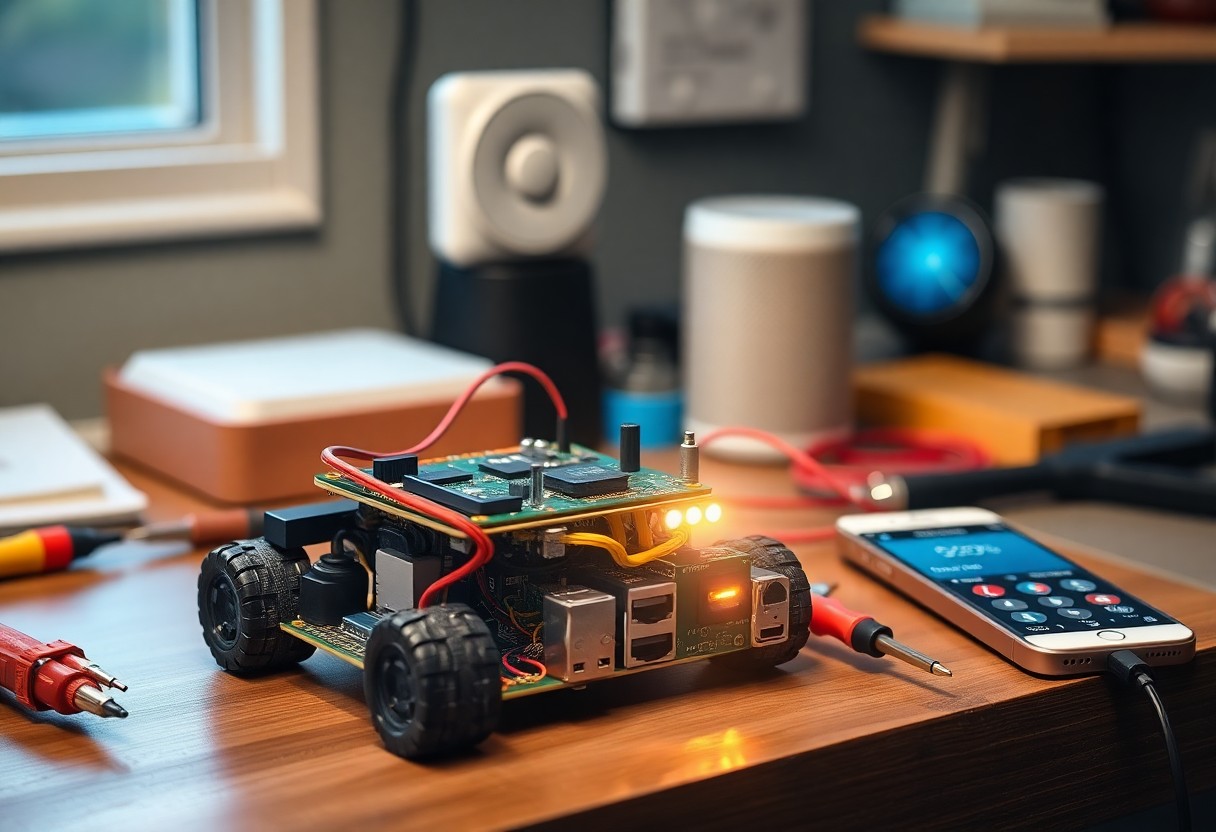
Integration of robotics into your home starts with understanding how devices communicate. You choose components that support common protocols like Wi-Fi or Zigbee. You design the robot’s function around tasks such as monitoring or object transport. You program it to respond to voice commands or sensor input. You test connectivity with existing smart systems to […]

Constructing a Robot Capable of Object Recognition
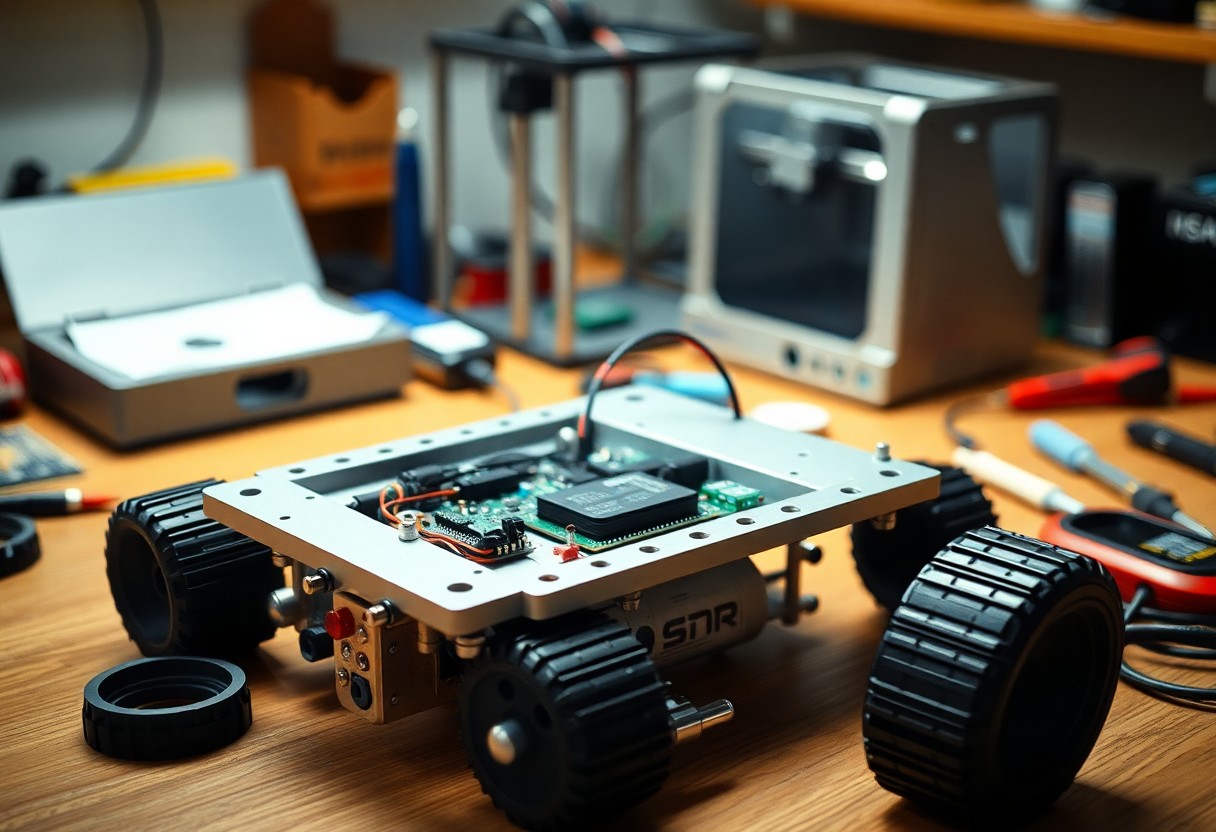
Construction of a robot capable of object recognition begins with integrating sensors, processing units, and machine learning models. You select cameras and depth sensors to capture visual data, then process it using trained neural networks to identify objects. Proper calibration and iterative testing ensure accuracy and responsiveness in real-world environments. The Mechanical Foundation Your robot […]

How to Build a Humanoid Robot Prototype
Over the past decade, humanoid robotics has moved from research labs to accessible DIY projects. You can build your own functional prototype by selecting the right frame materials, integrating servo motors for joint movement, programming basic locomotion, and using sensors for environmental awareness. This guide walks you through each step with precision and clarity. Assessing […]

Constructing a Robot with Autonomous Decision-Making
AI enables robots to assess environments and act independently. You design such systems by integrating sensors, processing units, and decision algorithms. You teach machines to interpret data and respond in real time. Your robot learns from inputs and adjusts behavior without human intervention. You build intelligence through code, hardware, and iterative testing. The Positronic Architecture […]

Building a Multi-Purpose Robot for Everyday Tasks
Just imagine a robot that handles chores, assists with errands, and adapts to your daily needs. You can design such a system by integrating modular hardware, responsive sensors, and intuitive software. This guide walks you through the practical steps to build a functional, multi-purpose robot that simplifies everyday life. The Physical Framework Your robot’s durability […]
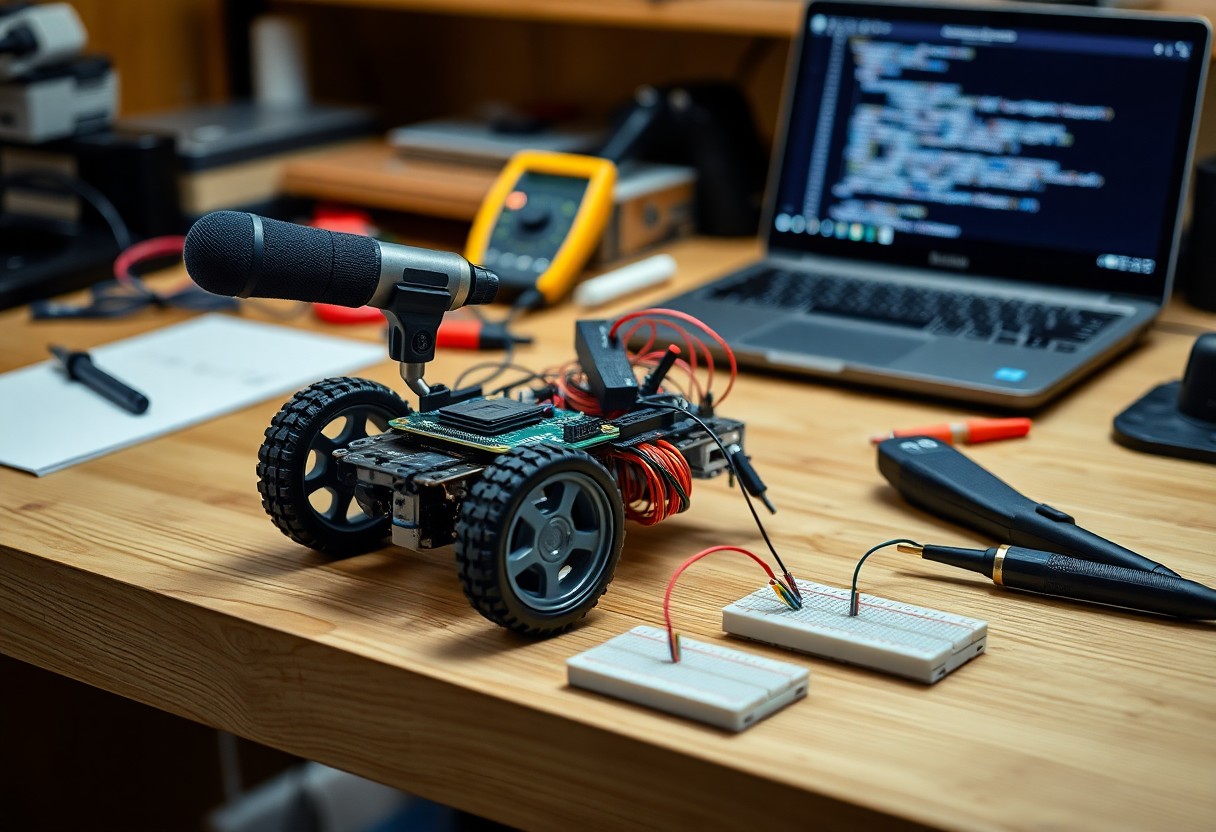
How to Build a Voice-Controlled Robot at Home
This guide shows you how to build a voice-controlled robot at home using affordable, easy-to-find components. You’ll learn to connect a microcontroller, motor driver, and microphone module, then program the system to respond to spoken commands. With clear steps and no prior robotics experience required, you’ll have a working voice-activated robot in hours. Assessing Core […]