
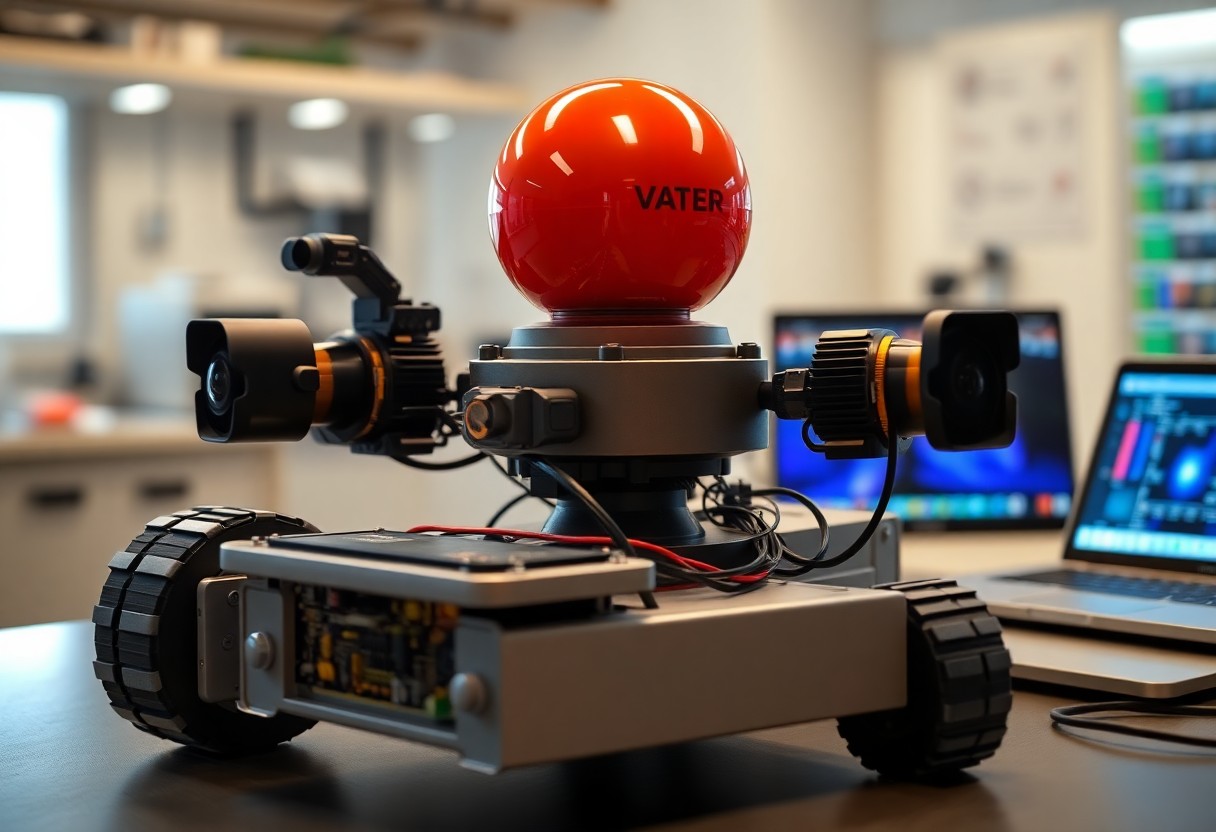
Many robotics projects fail because they rely on a single data source, but you can build a more responsive system by integrating multiple sensors. You’ll combine inputs from cameras, ultrasonic sensors, and IMUs to process environmental data instantly, enabling your robot to react intelligently and autonomously in dynamic conditions. The Sensory Apparatus You rely on […]
Blog

Constructing Robots Inspired by Nature and Biomimicry
With millions of years of evolutionary refinement, nature offers proven solutions to movement, sensing, and adaptation that you can apply directly to robotics. By observing animals, insects, and natural systems, you design machines that walk like insects, fly like birds, or grip like plant tendrils-achieving efficiency and functionality that traditional engineering often misses. The Biological […]

How to Build a Self-Balancing Robot from Scratch
Most self-balancing robots rely on precise sensor feedback and real-time control, and you can build one using an Arduino, a motor driver, MPU-6050 gyroscope, and DC motors. With basic coding and electronics skills, you’ll assemble and program a robot that maintains balance on two wheels by continuously adjusting motor output based on tilt data. Essential […]
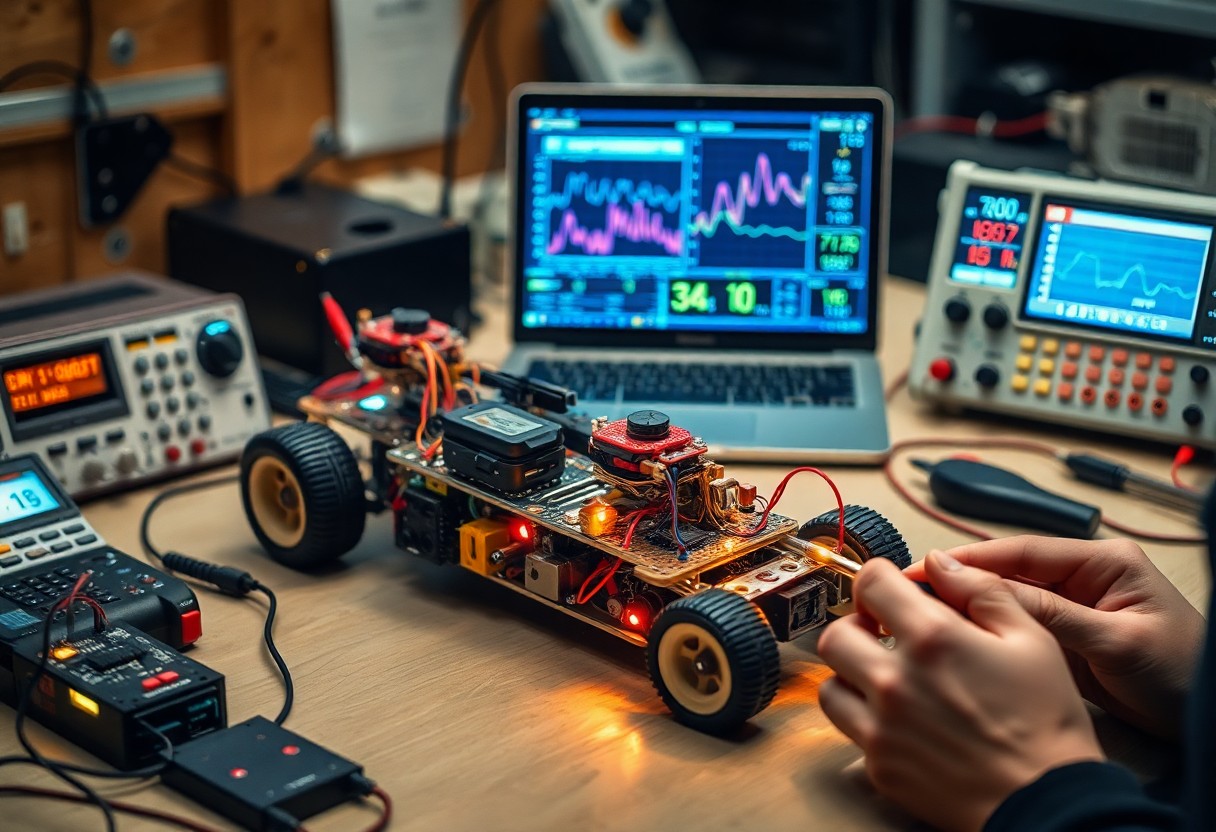
Constructing a Robot with Remote Monitoring and Telemetry
Most robotics projects fail because they lack real-time feedback and remote oversight. You can avoid this by integrating telemetry and remote monitoring from the start. These systems let you track performance, diagnose issues, and adjust operations from a distance, ensuring reliability and precision in dynamic environments. The Frame and the Motor Your robot’s frame sets […]
Building Robots with Open-Source AI Frameworks
OpenSource AI frameworks give you direct access to powerful tools that accelerate robot development. You can modify code, integrate sensors, and train models without licensing barriers. Platforms like TensorFlow, PyTorch, and ROS work together to turn ideas into functional robots faster and more transparently than ever. The Selection of Iron and Silicon You choose materials […]
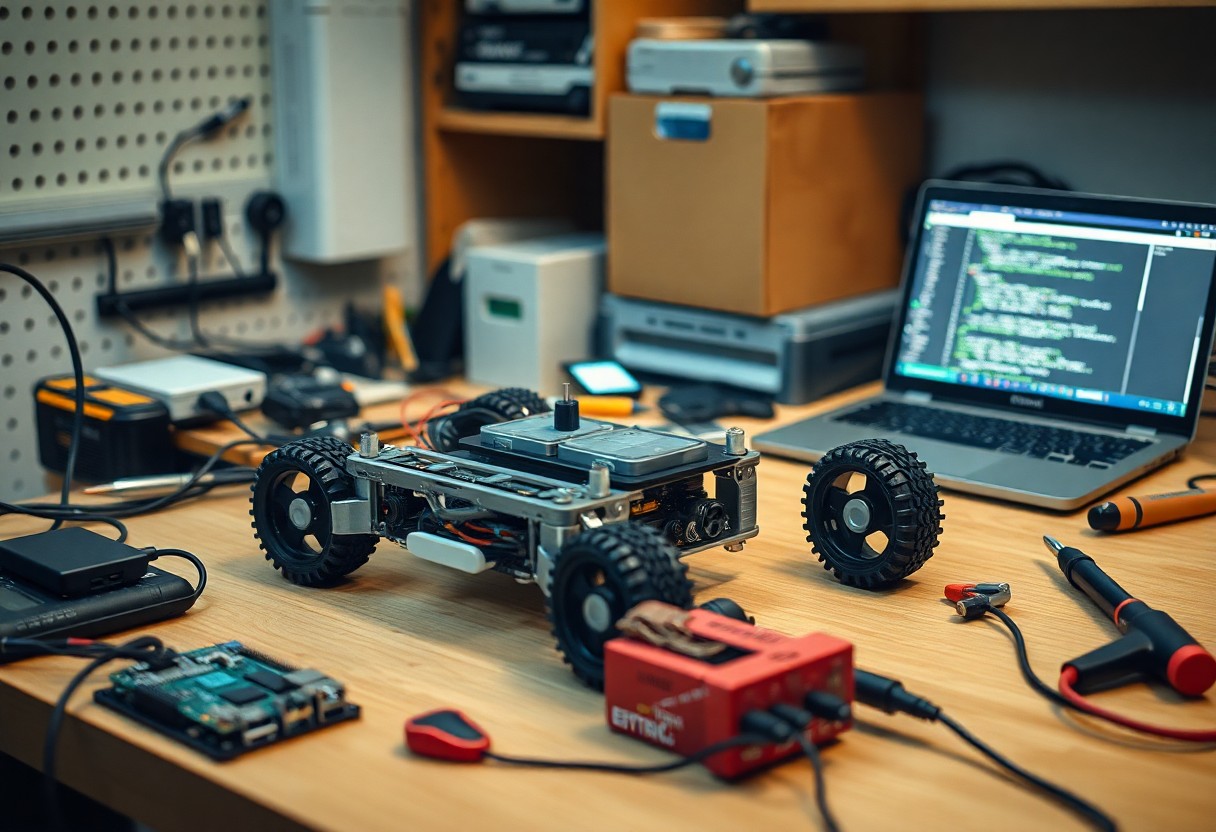
Constructing the Next Generation of DIY Intelligent Robots
It’s now possible for you to build intelligent robots at home using accessible tools and open-source platforms. You no longer need a lab or advanced degree to create machines that learn, adapt, and respond to their environment. With affordable sensors, modular components, and intuitive programming frameworks, you’re equipped to design, test, and refine smart robotic […]
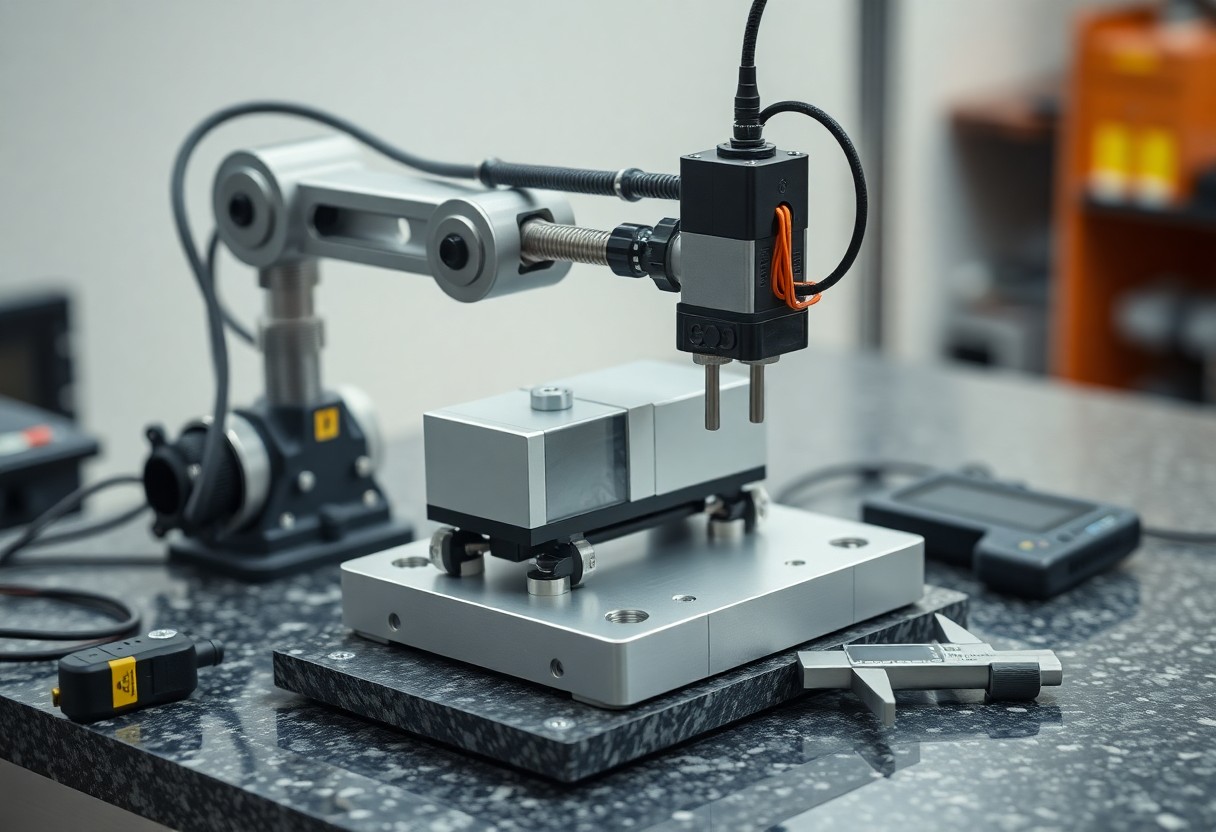
Building a Robot with Precision Motion Control
Control begins the moment your robot moves exactly as intended, not just roughly in the right direction. You design each component to respond with accuracy, using motors, encoders, and feedback loops that minimize error. Your choices in hardware and control algorithms determine how reliably your robot performs complex tasks. The Framework of the Machine Your […]

Constructing Autonomous Robots for Everyday Applications
Just imagine robots moving through your home, handling chores, or guiding elderly family members with precision and care. You’re already seeing early versions in vacuums and lawn mowers, but today’s engineering advances allow you to build systems that perceive, decide, and act independently in real-world settings using sensors, AI, and modular design. The First Principles […]
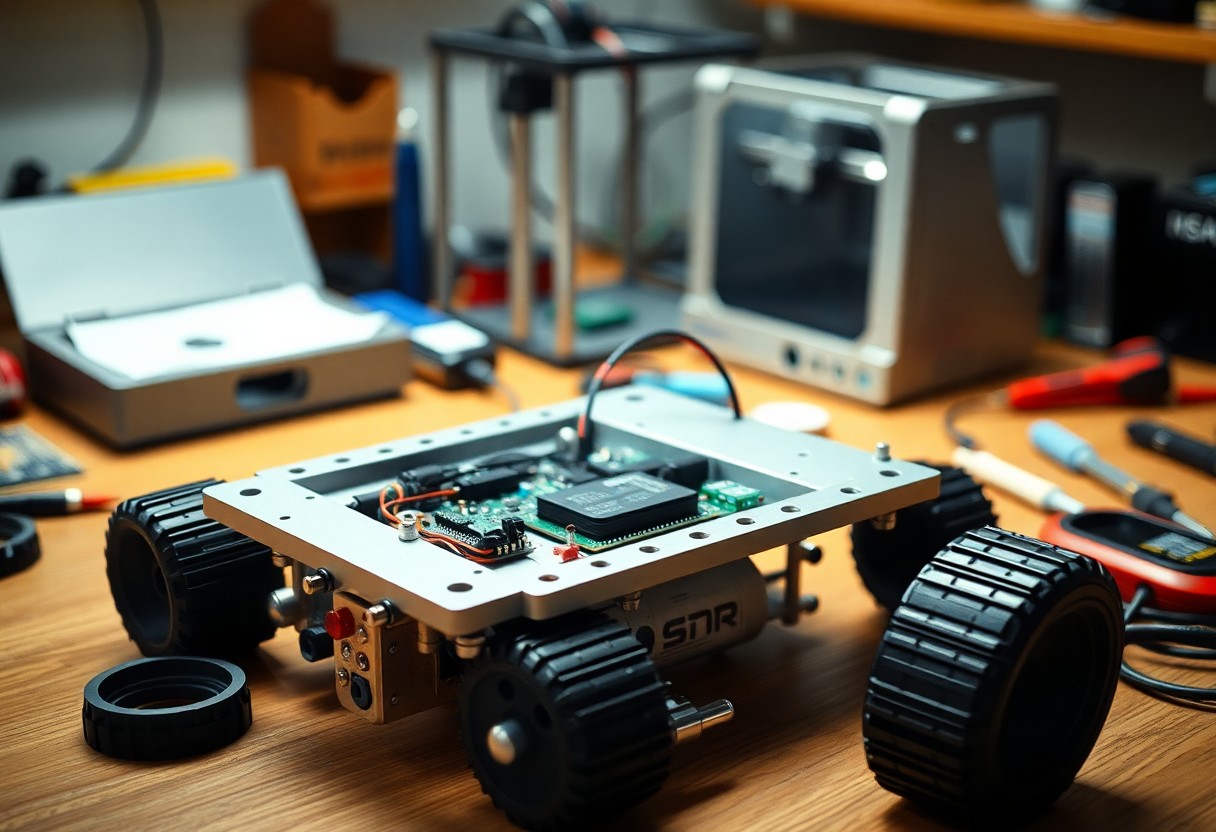
Constructing Robots with Scalable Modular Architectures
Architecture defines how components integrate and evolve in robotic systems. You design scalable modular robots by standardizing interfaces, enabling plug-and-play functionality across configurations. This approach simplifies upgrades, repairs, and adaptation to new tasks. You gain flexibility without sacrificing performance, making modular design a practical foundation for next-generation robotics. The Modular Premise You design systems where […]
How to Build a Robot That Interacts with Humans Naturally
Robot interaction begins with understanding human cues. You design sensors to detect speech, facial expressions, and gestures. You integrate natural language processing and machine learning to interpret intent. You refine responses through real-world feedback. Your robot learns to respond in ways that feel intuitive, building trust and clarity in everyday environments. Identifying Key Factors for […]