
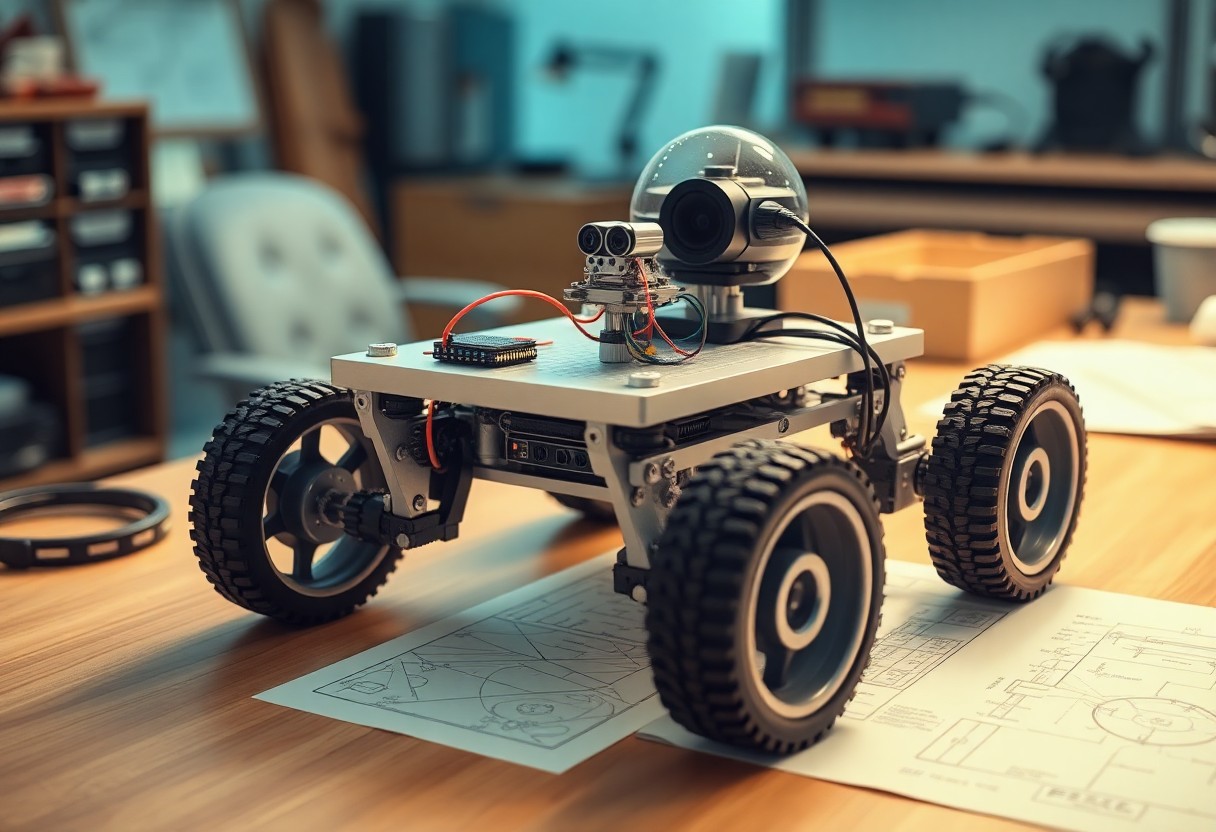
Most mobile robot projects ask you to balance power, sensing, locomotion, control, and materials while meeting weight and cost constraints. You should prioritize clear requirements, modular architecture, and testing to ensure predictable behavior in varied environments. Mechanical Architecture and Locomotion Mechanical layout sets wheelbase, center of gravity, and articulation; you should optimize placement for stability, […]