
With step-by-step plans and focused material lists, you build classroom robots that teach mechanics, electronics, and programming, assess student learning, and scale project complexity for different grade levels. Fundamental Design Principles Design clear constraints, modular components, and accessible documentation so you can scope projects that teach systems thinking while matching student skill levels and available […]
Category: Technology Ethics
Building a Robot with Real-Time Control Systems
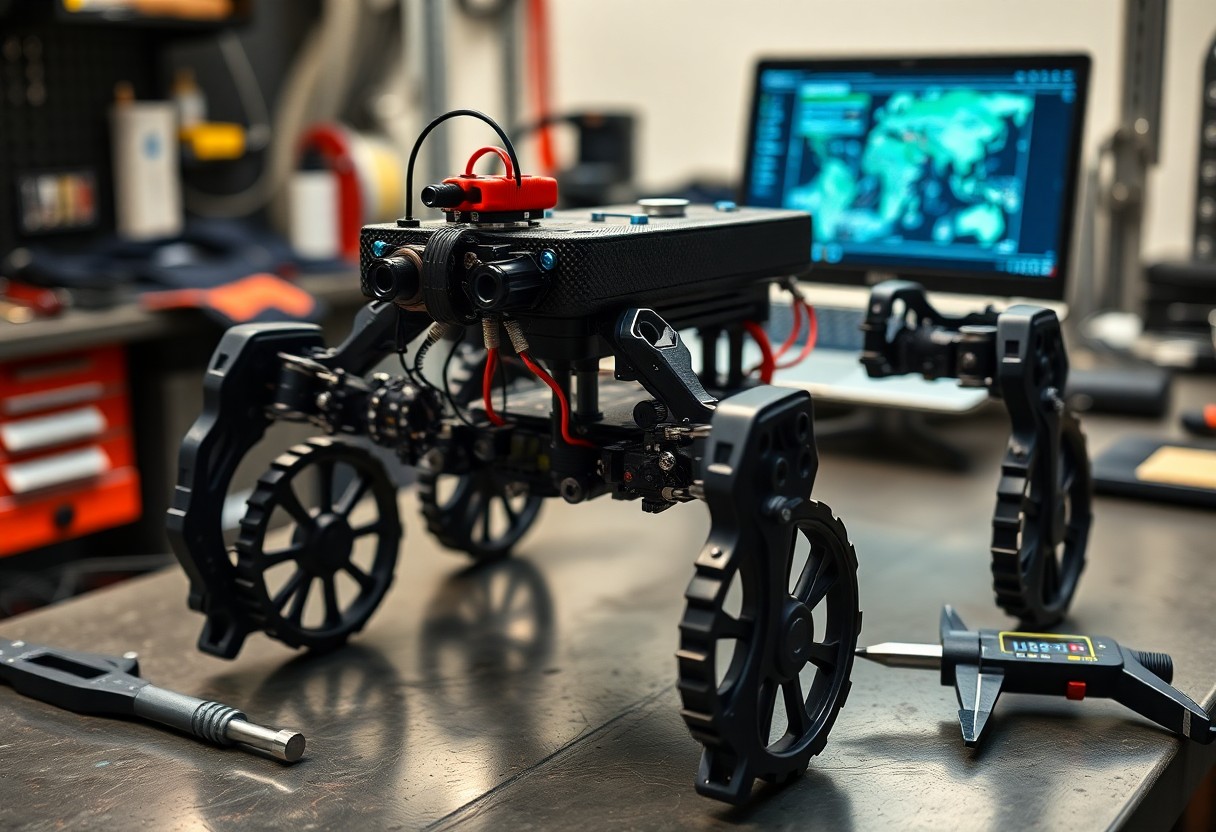
With real-time scheduling and tight sensor-actuator integration, you learn to design deterministic control loops, handle interrupts, and verify timing to guarantee safe, reliable robot behavior. Hardware Architecture for Real-Time Performance Hardware choices determine latency and determinism; you should partition compute, I/O, and power to meet deadlines, using dedicated processors for safety-critical loops and real-time OS […]
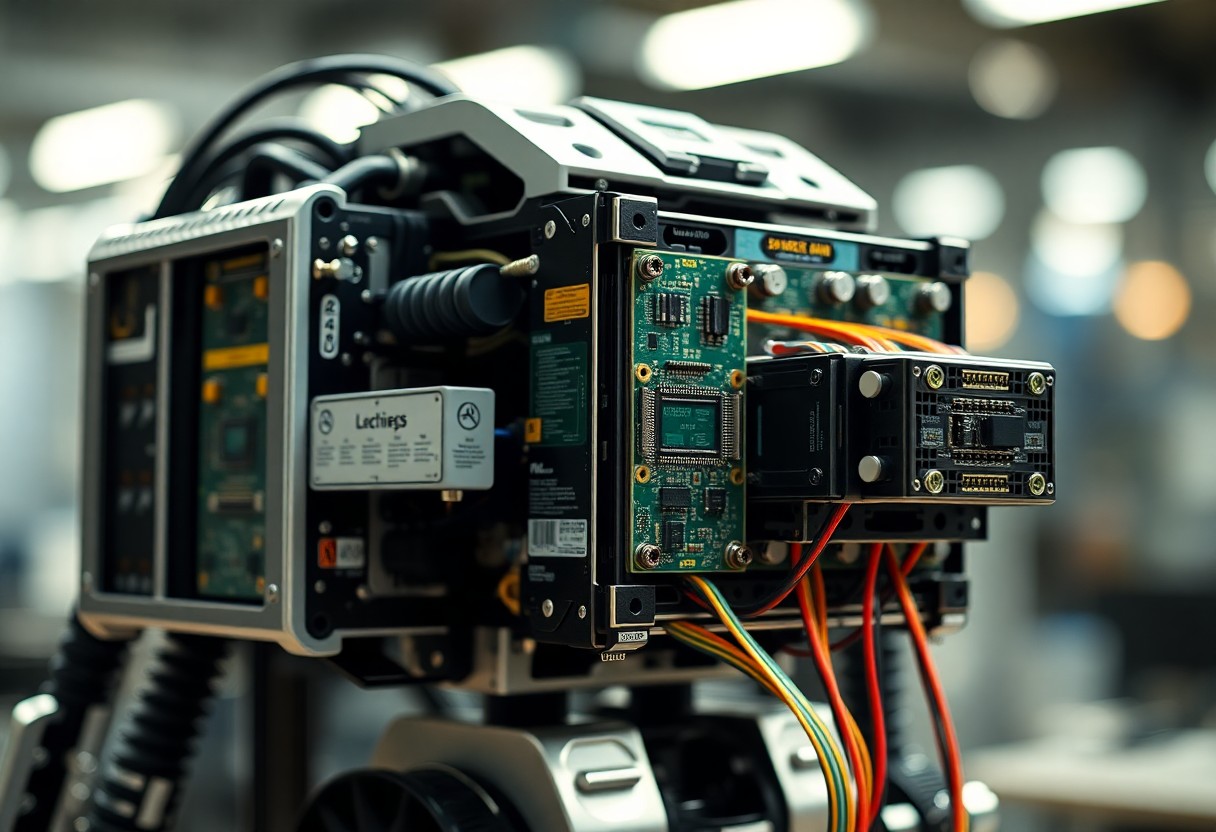
Building a Robot with Expandable Hardware Architecture
It’s wise to design modular interfaces, standardized mounts, and flexible power and communication buses so you can add sensors, actuators, and controllers without redesigning the core chassis. Core System Backbone and Power Distribution Backbone systems should prioritize scalable bus architectures and centralized power management so you can expand modules without rework. Plan high-current traces, common […]
Designing and Building a Robot Control Board
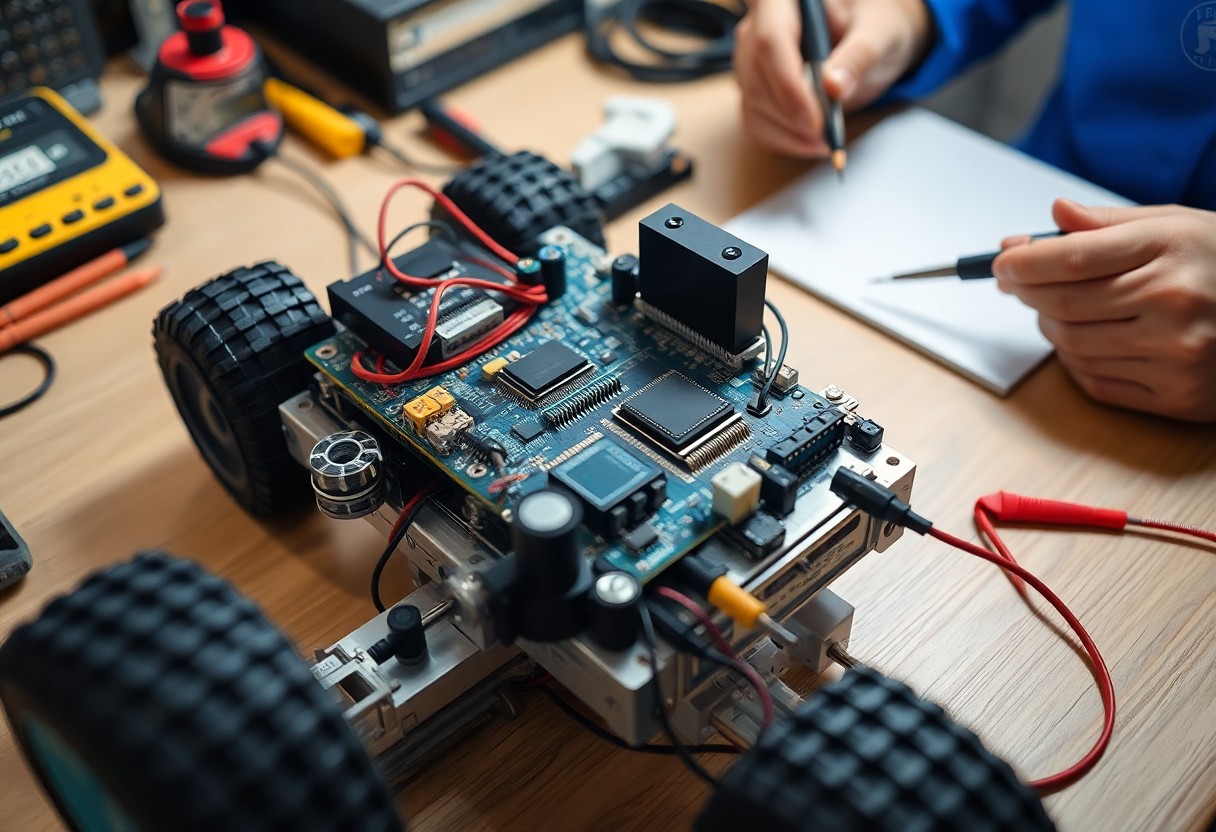
Just follow systematic component selection, PCB layout, firmware architecture, and testing to design and build a Robot Control Board that meets your performance and safety requirements. Defining System Requirements and Specifications Scope sets the functional and nonfunctional targets you use to prioritize features, power budgets, environmental ratings, timing constraints, and integration points for the control […]
Constructing a Lightweight Robot for Maximum Efficiency
Many designers prioritize weight reduction to boost robot efficiency, so you must choose high-strength low-mass materials, simplify mechanisms, and optimize powertrain and control algorithms to maximize performance without sacrificing durability. Material Science and Structural Optimization Materials selection and structural tuning let you shed unnecessary mass while preserving stiffness and fatigue life; you prioritize fiber-reinforced laminates […]
Building a Sensor System for a Custom Robot
Over a dozen sensor options shape your design choices; you must weigh range, resolution, and interface compatibility. This post outlines selection, integration, and testing so you can build an effective sensing system for a custom robot. Sensor Selection and Requirement Analysis Choose sensors that match the measurements you need, interface with your controller, fit your […]
How to Design and Build a Robot Drive System
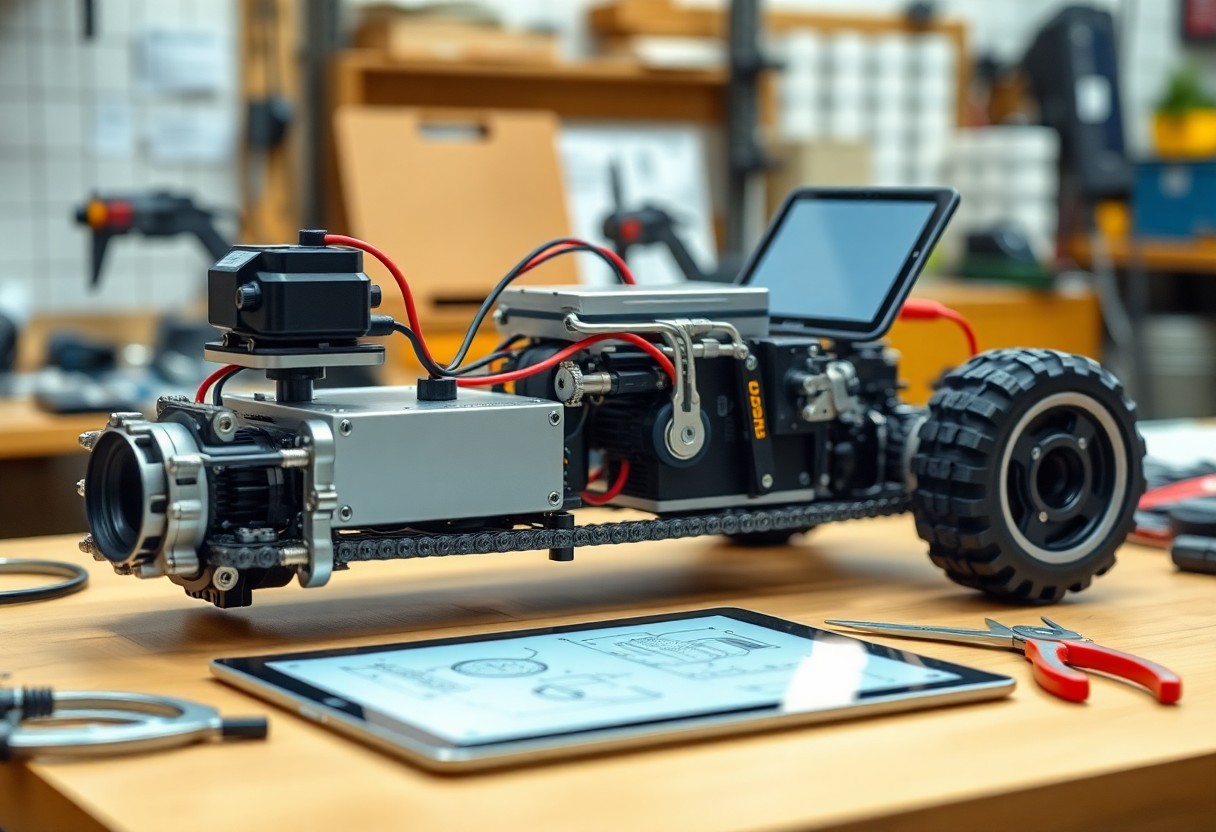
There’s a step-by-step method you can follow to design and build a robot drive system that selects motors, gear ratios, chassis layout, and controllers to meet required speed, torque, and handling while ensuring reliable integration and testing. Evaluating Drive Configurations for Specific Environments Terrain dictates your drivetrain choice; you must weigh traction, maneuverability, clearance, and […]
Step-by-Step Guide to Building a Custom Robot Platform
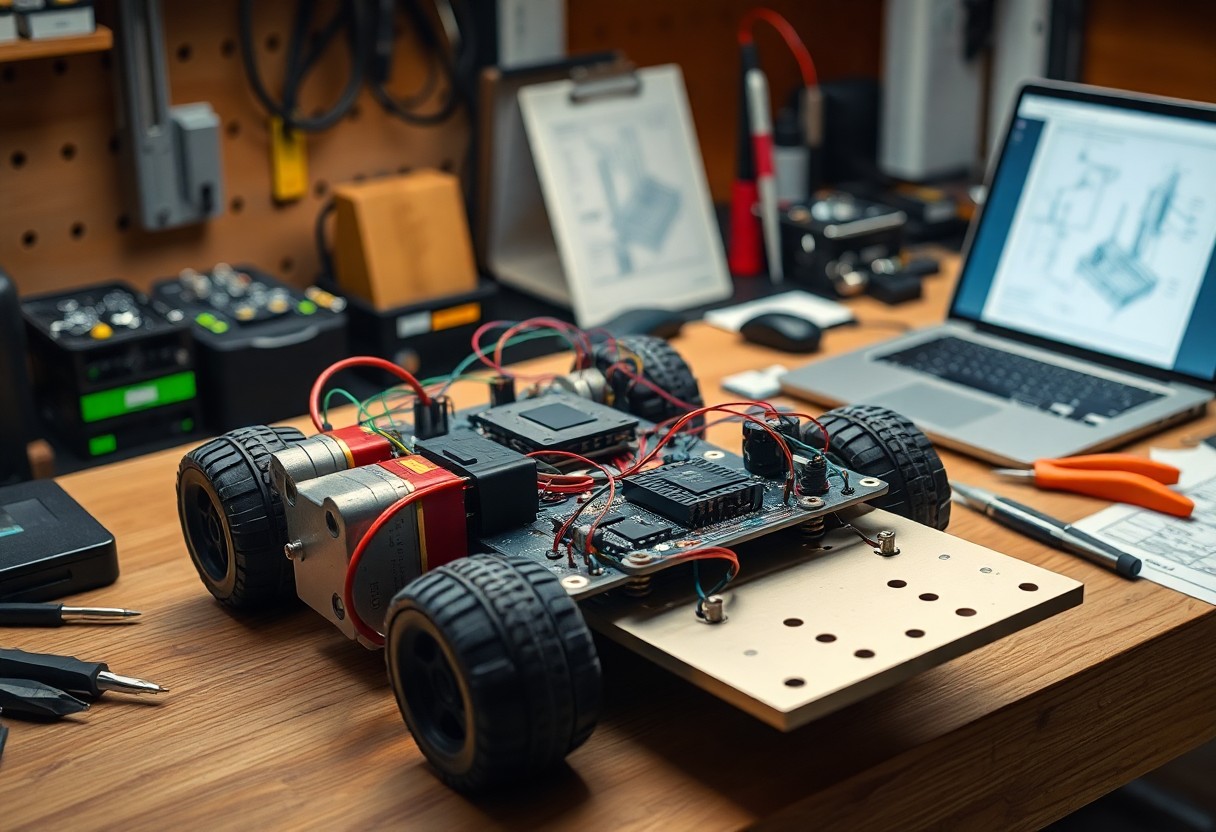
Most projects succeed when you follow clear steps: this guide shows you how to design the chassis, choose motors and controllers, integrate sensors, and test motion to build a reliable custom robot platform. Classification of Robotic Platform Types Platform categories help you weigh mobility, payload, control complexity and environment for your build, enabling targeted component […]

Building a Compact Robot for Tight Spaces
Spaces within machinery and ducts force you to design compact robots that fit, maneuver, and perform tasks efficiently. Design Principles for Miniaturization You focus on minimizing footprint by integrating functions, reducing tolerances, and planning thermal and power paths early, ensuring the compact robot fits tight spaces while maintaining performance. Spatial Optimization and Component Layout Arrange […]
Lessons Learned from Failed Robot Builds
Robotics failures teach you practical debugging, design trade-offs, and testing discipline so you can refine prototypes faster and avoid repeated mistakes. Mechanical Integrity and Structural Design Structural design failures teach you to prioritize joint strength, correct load paths, and redundant supports so your robot survives impacts and sustained operation. Material Stress and Fatigue Limits Testing […]