

Unmanned ground vehicles have become a visible presence on the front lines of the Ukraine conflict, reshaping how reconnaissance, logistics, and direct combat operations are conducted. You now encounter robotic platforms hauling supplies under fire, probing enemy positions, and even engaging targets with onboard weapons, marking a shift in modern battlefield dynamics. The Iron Mules […]
Category: Artificial Intelligence

AI-Powered Robotics on the Modern Battlefield
Most military analysts agree that autonomous systems now shape engagement outcomes as much as firepower. You operate in an era where unmanned ground vehicles scout hostile zones, AI-driven drones identify threats in real time, and robotic logistics units sustain frontline operations without direct human oversight. A single AI-controlled swarm can execute maneuvers once requiring entire […]

The Growing Role of AI in Military Robotics
With militaries around the world integrating artificial intelligence into robotic systems, you are witnessing a transformation in how modern warfare is conducted. Autonomous drones, intelligent surveillance platforms, and AI-driven decision support tools are no longer speculative concepts but active components of defense strategies. A mid-sized SaaS firm developing logistics algorithms for defense contractors recently demonstrated […]

Engineering Next-Generation Military Ground Robots
With modern battlefields demanding faster decisions and greater operational reach, you are now designing ground robots that integrate advanced mobility, real-time sensing, and autonomous decision-making to operate alongside human forces in high-threat environments. These systems must endure extreme terrain, respond to dynamic threats, and maintain secure communication under electronic attack, setting new benchmarks in durability […]

Here are 20 neutral, news-style headline ideas focused on the role of robots and autonomous systems in the war in Ukraine –
There’s growing evidence that drones, ground robots, and automated systems are reshaping battlefield dynamics in Ukraine. You’re now seeing machines perform reconnaissance, deliver supplies, and even engage targets with increasing frequency. These tools are no longer futuristic concepts but operational assets used by both sides in real-time combat scenarios. The Sky Above Robots in the […]
Building Robots with Open-Source AI Frameworks
OpenSource AI frameworks give you direct access to powerful tools that accelerate robot development. You can modify code, integrate sensors, and train models without licensing barriers. Platforms like TensorFlow, PyTorch, and ROS work together to turn ideas into functional robots faster and more transparently than ever. The Selection of Iron and Silicon You choose materials […]
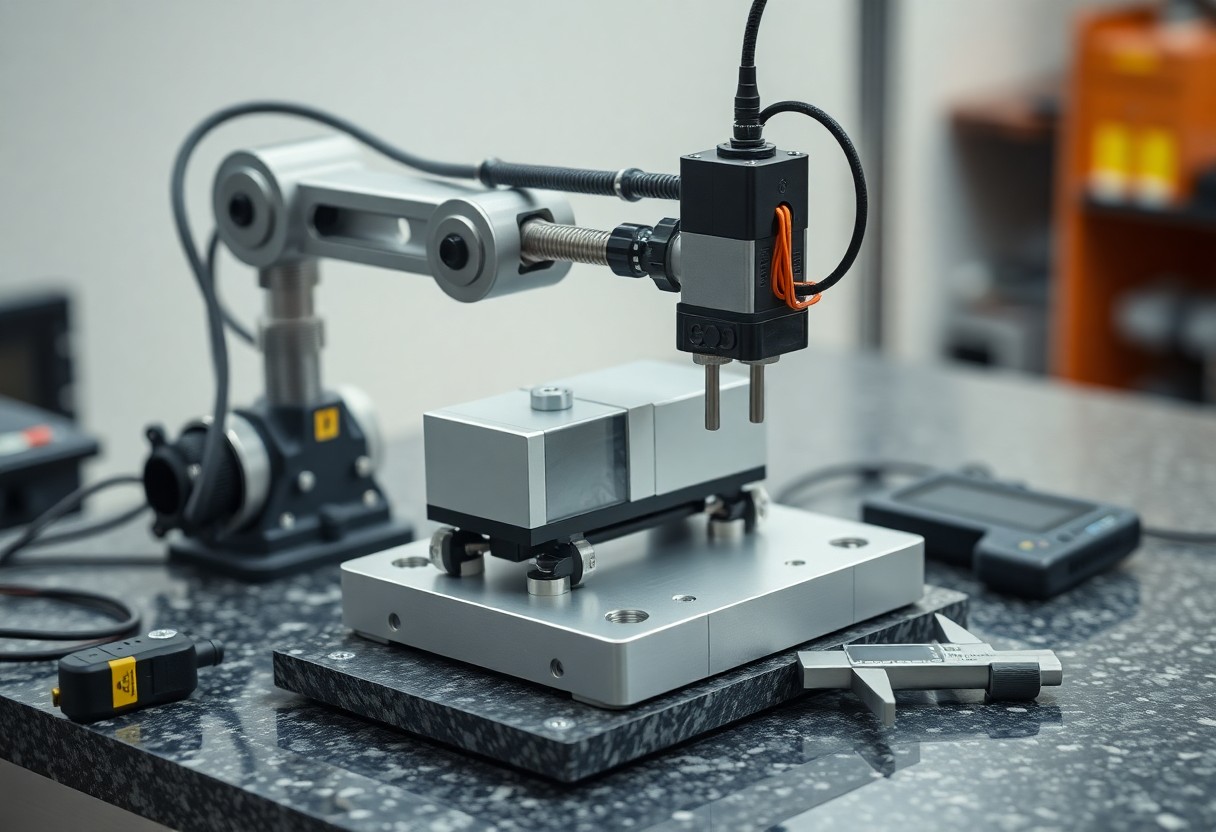
Building a Robot with Precision Motion Control
Control begins the moment your robot moves exactly as intended, not just roughly in the right direction. You design each component to respond with accuracy, using motors, encoders, and feedback loops that minimize error. Your choices in hardware and control algorithms determine how reliably your robot performs complex tasks. The Framework of the Machine Your […]
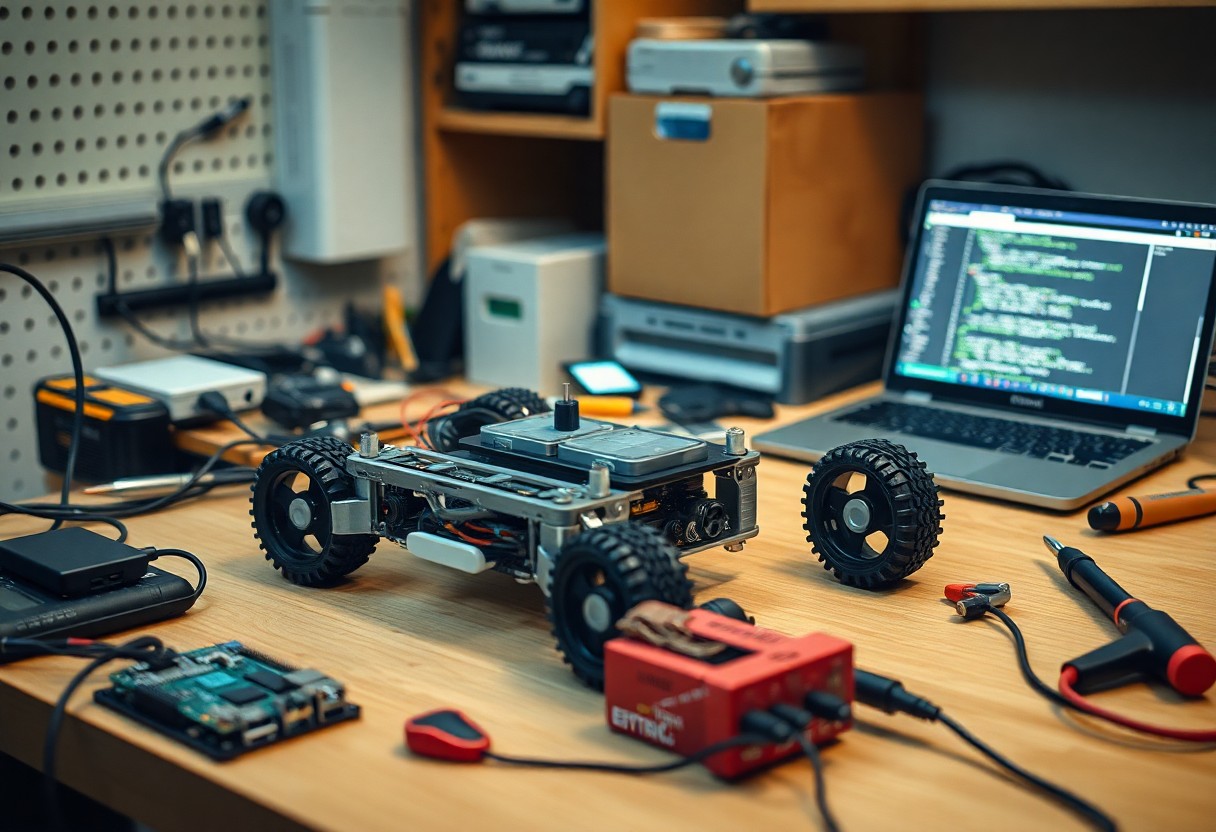
Constructing DIY Robots with AI-Powered Automation
AI enables you to build functional robots at home using accessible tools and smart programming. You can integrate sensors, microcontrollers, and machine learning models to create machines that learn and adapt. This guide shows you how to design, assemble, and automate your own intelligent robots with practical, step-by-step methods. The Silicon Cerebrum Your robot’s intelligence […]

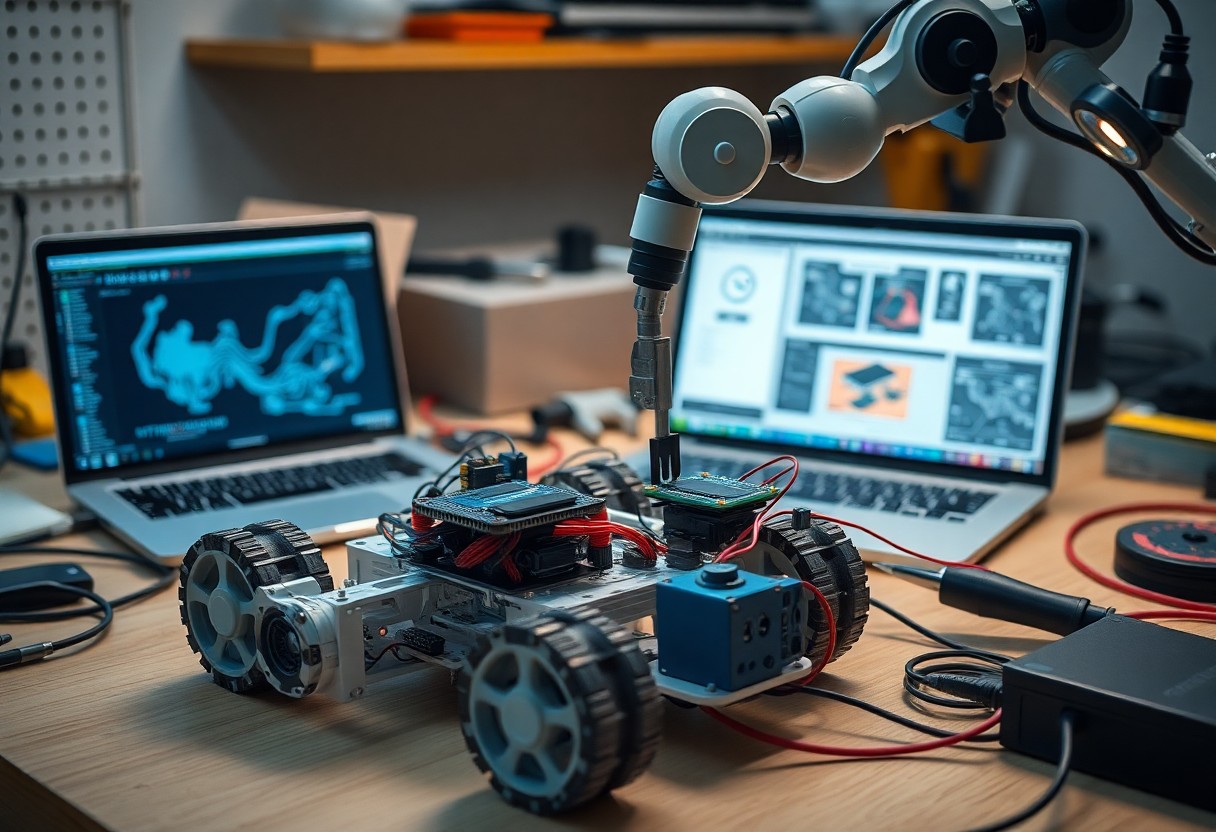
Building a Smart Robot with AI and Computer Vision
With advances in artificial intelligence and computer vision, you can now build a smart robot that perceives and reacts to its environment in real time. By integrating sensors, cameras, and machine learning models, you enable your robot to identify objects, make decisions, and perform complex tasks autonomously. The Positronic Foundation You build intelligence not from […]

Constructing a Robot for Research and Experimentation
Many research teams construct modular robots so you can test sensors, algorithms, and controls; plan hardware, software, safety, and repeatable experiments to gather valid data. Conceptual Design and Research Objectives Clarify the project’s research goals so you can align design choices, sensor suites, and experimental metrics with measurable outcomes. Defining Functional Specifications Specify performance targets, […]