
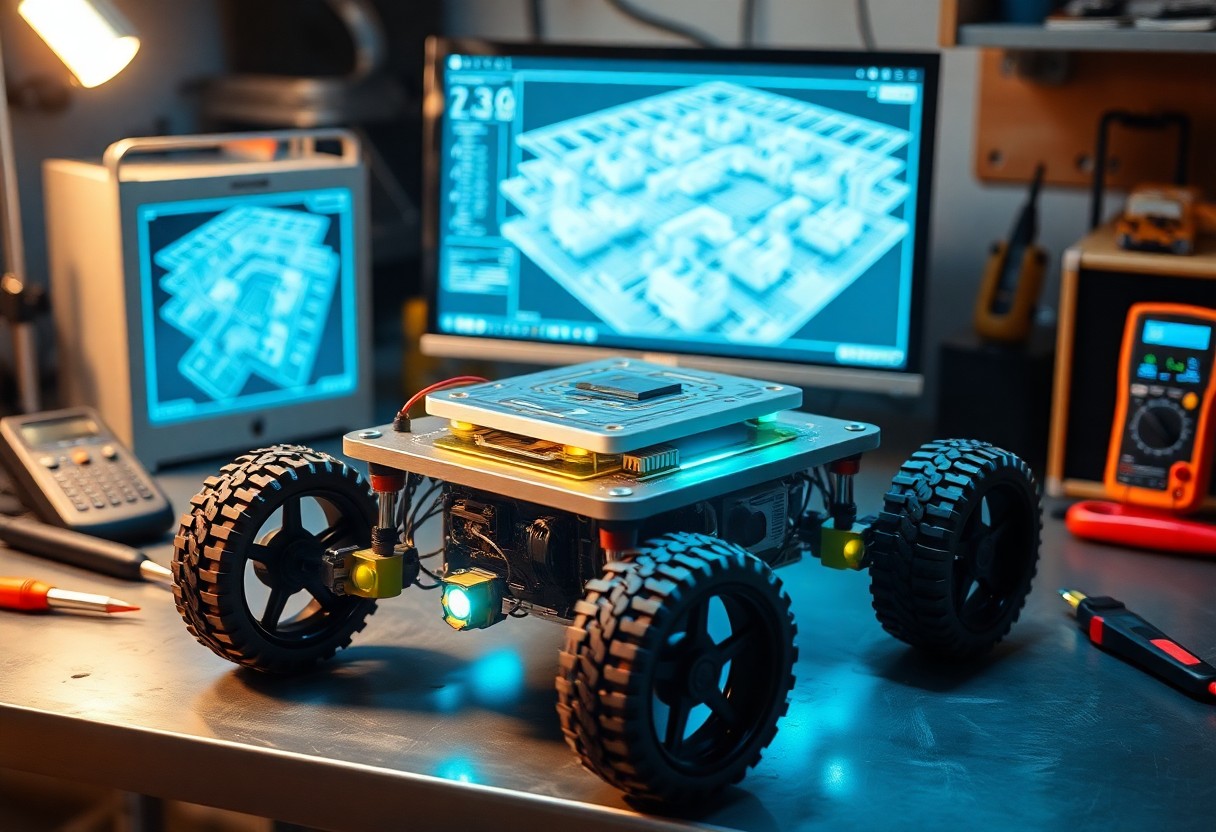
Just define sensor choices, SLAM algorithms, chassis, and power requirements so you can design and build an autonomous mapping robot that produces accurate maps, maintains localization, and operates safely during field testing. Hardware Architecture and Component Selection Your hardware design balances processing, power, and payload constraints; choose a modular chassis, scalable compute (embedded GPU or […]
Tag: Robotics
Constructing Robots for Educational Engineering Projects
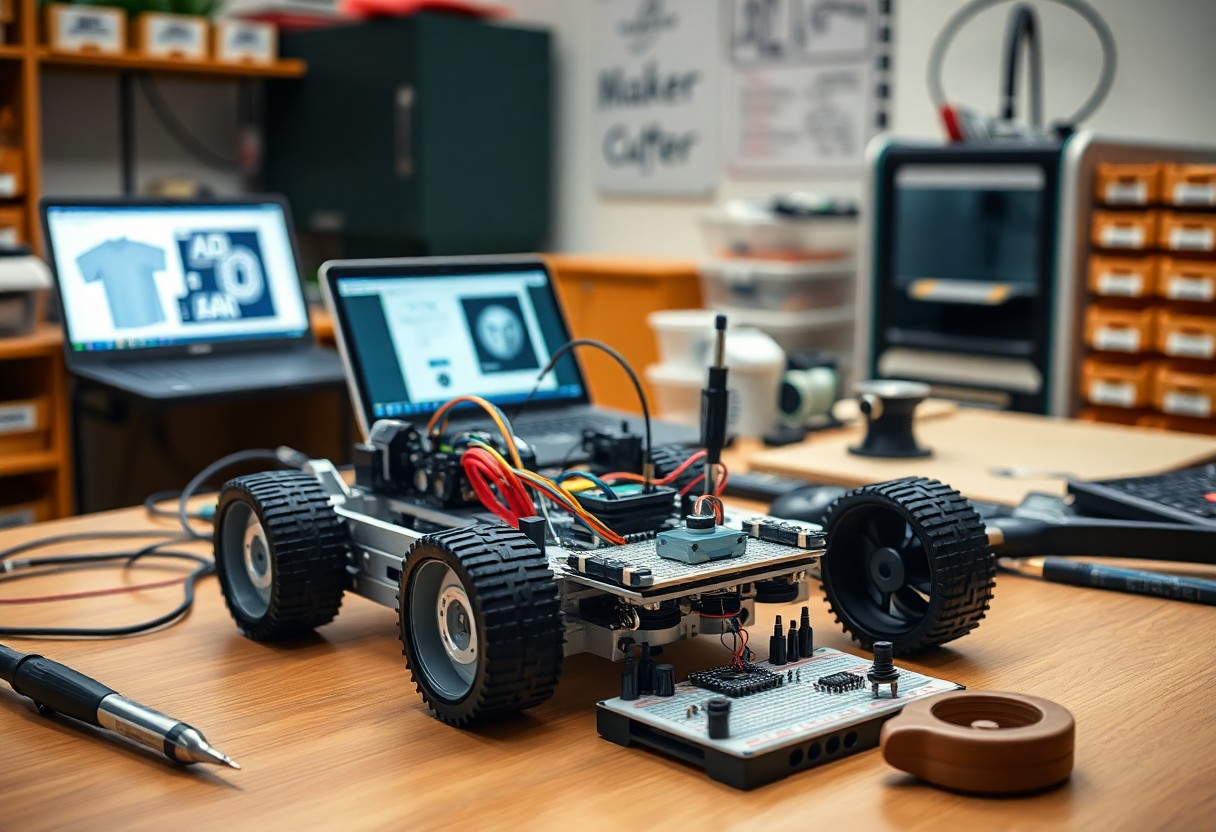
With step-by-step plans and focused material lists, you build classroom robots that teach mechanics, electronics, and programming, assess student learning, and scale project complexity for different grade levels. Fundamental Design Principles Design clear constraints, modular components, and accessible documentation so you can scope projects that teach systems thinking while matching student skill levels and available […]

Constructing a Robot for Research and Experimentation
Many research teams construct modular robots so you can test sensors, algorithms, and controls; plan hardware, software, safety, and repeatable experiments to gather valid data. Conceptual Design and Research Objectives Clarify the project’s research goals so you can align design choices, sensor suites, and experimental metrics with measurable outcomes. Defining Functional Specifications Specify performance targets, […]
Constructing Robots That Can Adapt to New Tasks
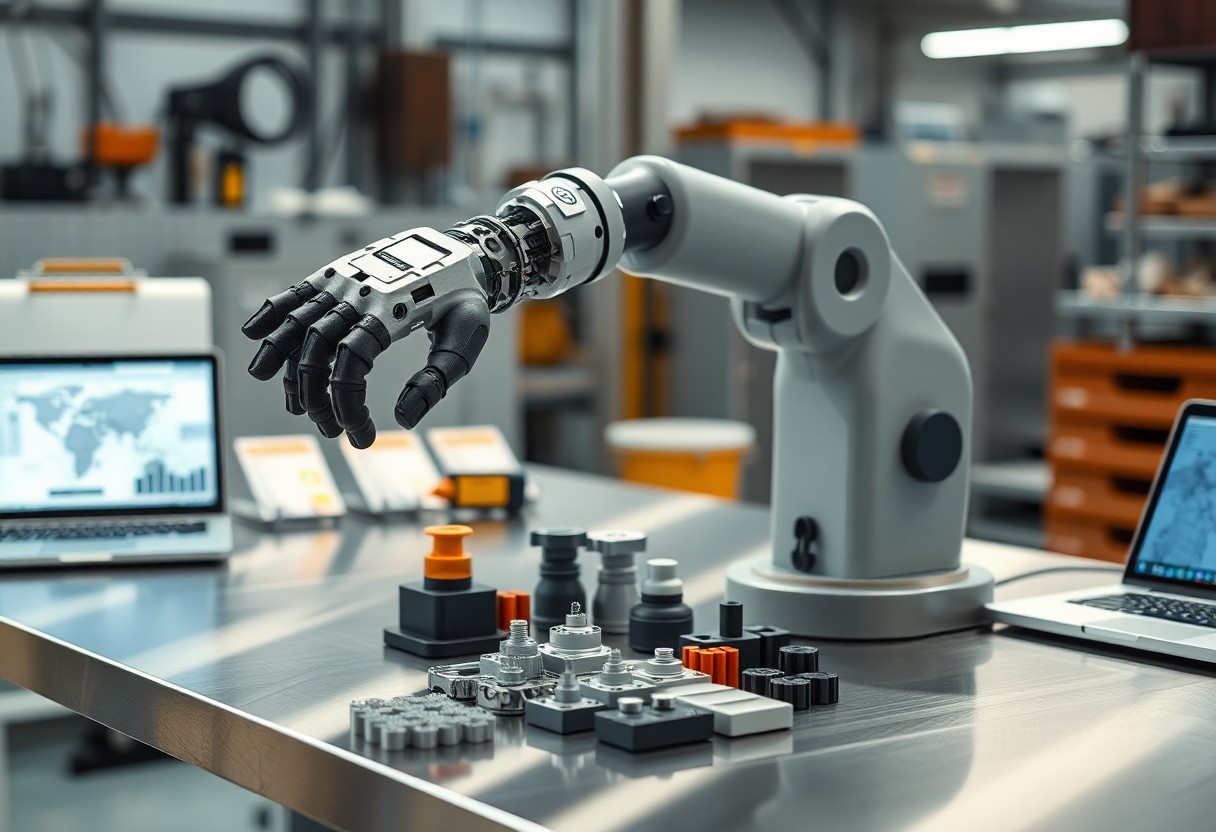
Just design adaptable control and learning frameworks so your robot generalizes across tasks, combining modular hardware, meta-learning algorithms, and online adaptation to update policies on the fly. Cognitive Architectures for Adaptive Control Architectures integrate perception, memory, and planning so you can reconfigure behavior across tasks with minimal retraining and maintain consistent performance. Neural Network Foundations […]
Constructing Robots with 3D-Printed Structural Parts
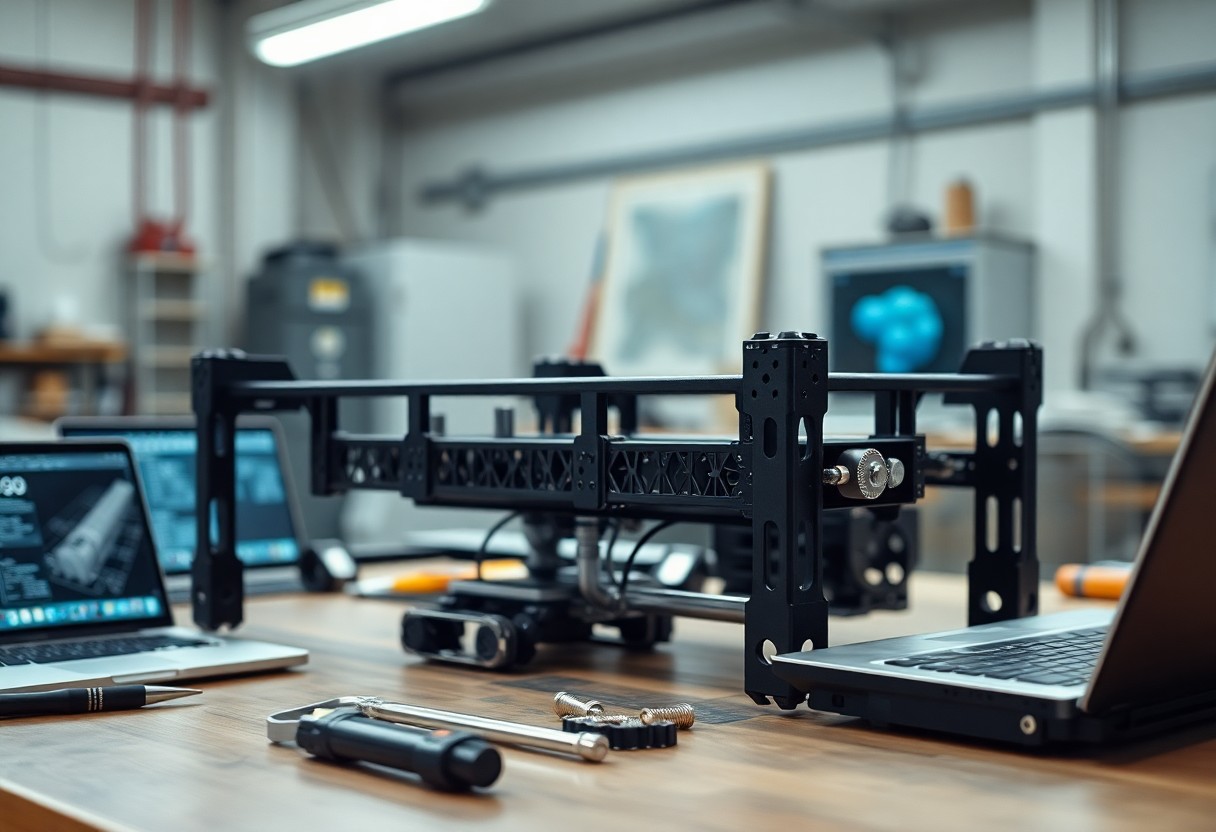
There’s a proven approach you can follow to design and assemble robots with 3D-printed frames, choosing materials and joint geometries and integrating sensors and actuators to balance strength, weight, and function while shortening prototyping cycles. Material Selection for Structural Integrity Material choice determines load paths, fatigue performance, and failure modes, so you should prioritize tensile […]
Lessons Learned from Failed Robot Builds
Robotics failures teach you practical debugging, design trade-offs, and testing discipline so you can refine prototypes faster and avoid repeated mistakes. Mechanical Integrity and Structural Design Structural design failures teach you to prioritize joint strength, correct load paths, and redundant supports so your robot survives impacts and sustained operation. Material Stress and Fatigue Limits Testing […]

Design for Manufacturability in Robotics
There’s clear benefit when you adopt manufacturability-focused design: you lower costs, simplify assembly, improve yield, and accelerate time-to-market for robotic systems by selecting standard components, minimizing part count, and designing for repeatable processes. Core Principles of Robotic DfM You should focus on reducing part count, standardizing interfaces, and designing tolerances for predictable assembly so manufacturing […]
Constructing Robots for Continuous Operation
It’s your task to design robots for nonstop service by ensuring reliable power systems, modular maintenance access, redundant sensors, and fault-tolerant control so you can maintain uptime, schedule predictive repairs, and optimize long-term performance in demanding environments. Energy Storage and Power Management Power architecture must prioritize predictable runtime, thermal handling, and scalable capacity so you […]

Building Redundancy into Robotic Systems
You design systems with redundant sensors, parallel controllers, and independent power paths to sustain operation during failures, applying fault-detection algorithms and graceful degradation to preserve mission objectives. Hardware Redundancy and Mechanical Over-Actuation You distribute extra actuators and parallel load paths so the robot maintains motion after component failure, enabling graceful degradation and controlled fallback without […]

Cable Management Best Practices in Robotics
Robotics systems require disciplined cable routing so you avoid interference, reduce wear, and simplify maintenance; you should use proper strain relief, color-coded labeling, secured cable channels, and regular inspections to maintain performance and safety. Dynamic Motion and Bend Radius Requirements Motion profiles determine minimum bend radii and dynamic fatigue factors you must plan for to […]