
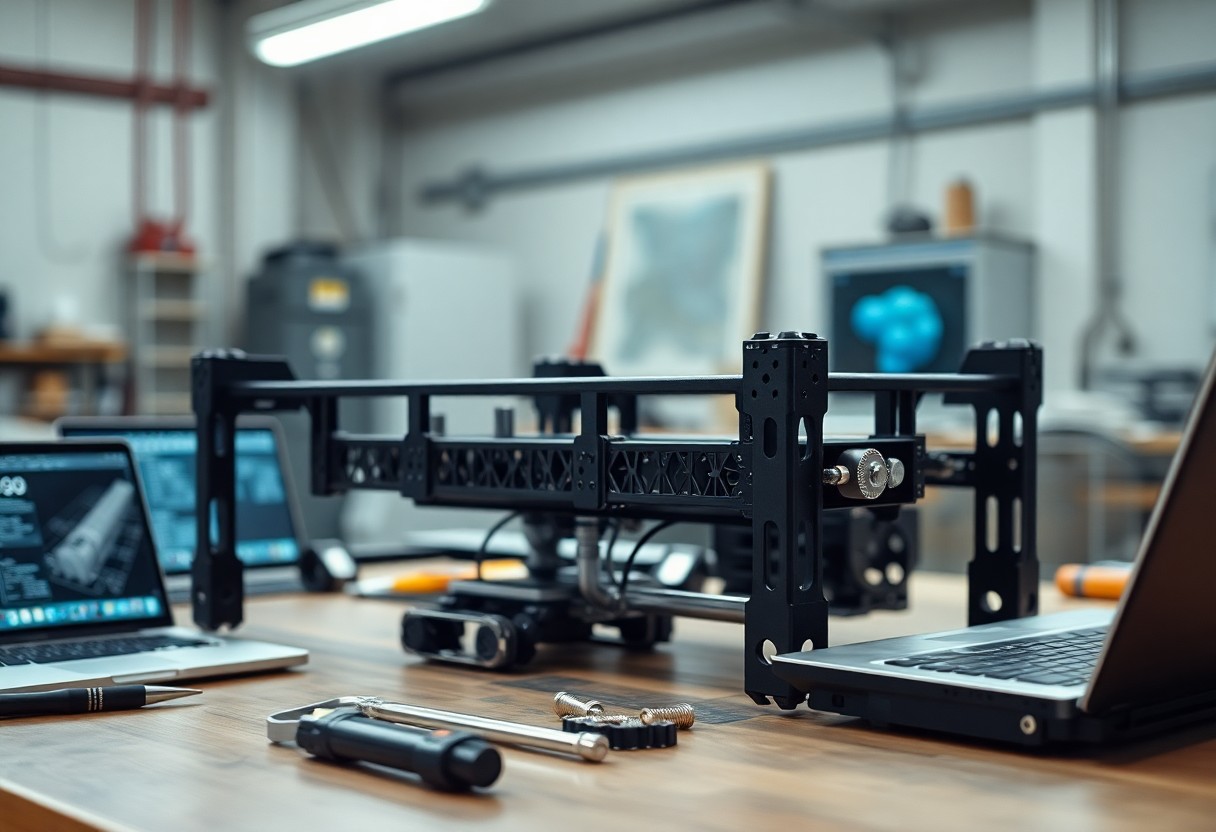
There’s a proven approach you can follow to design and assemble robots with 3D-printed frames, choosing materials and joint geometries and integrating sensors and actuators to balance strength, weight, and function while shortening prototyping cycles. Material Selection for Structural Integrity Material choice determines load paths, fatigue performance, and failure modes, so you should prioritize tensile […]
Category: Technology
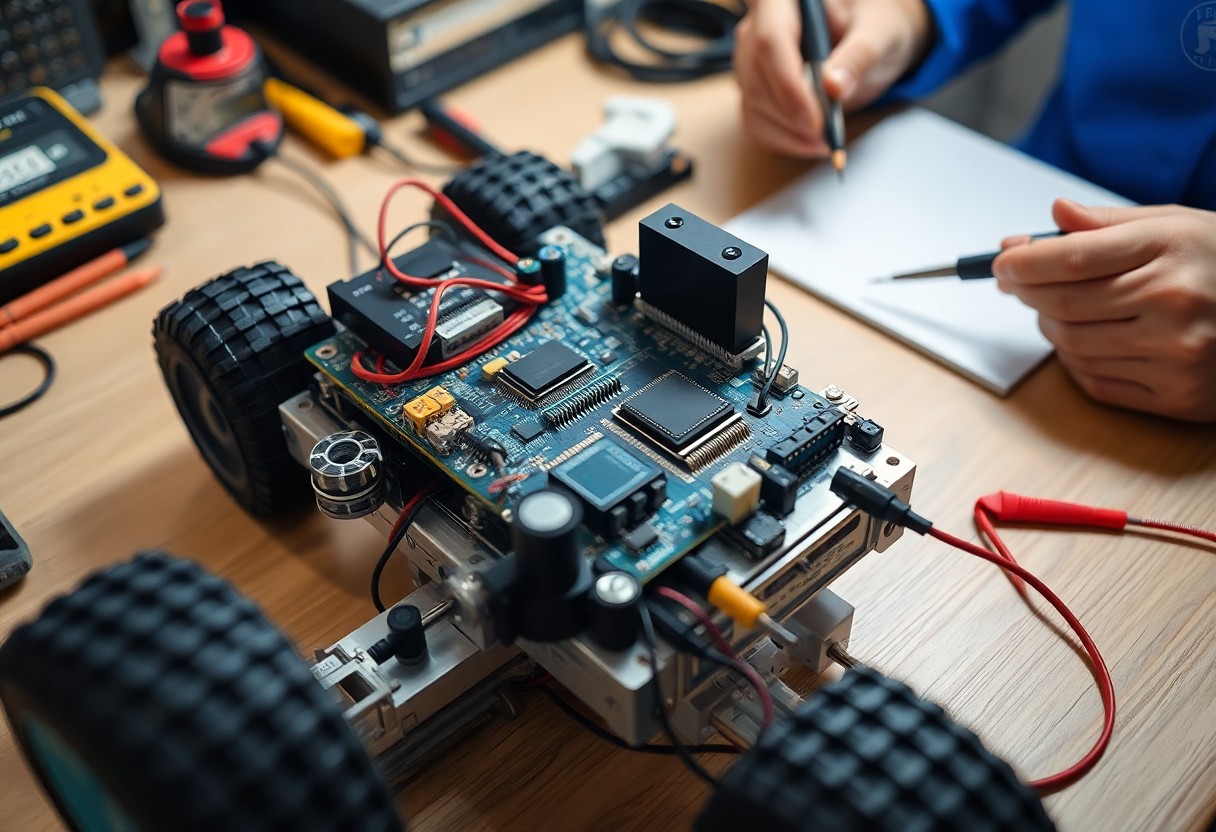
Building a Sensor System for a Custom Robot
Over a dozen sensor options shape your design choices; you must weigh range, resolution, and interface compatibility. This post outlines selection, integration, and testing so you can build an effective sensing system for a custom robot. Sensor Selection and Requirement Analysis Choose sensors that match the measurements you need, interface with your controller, fit your […]
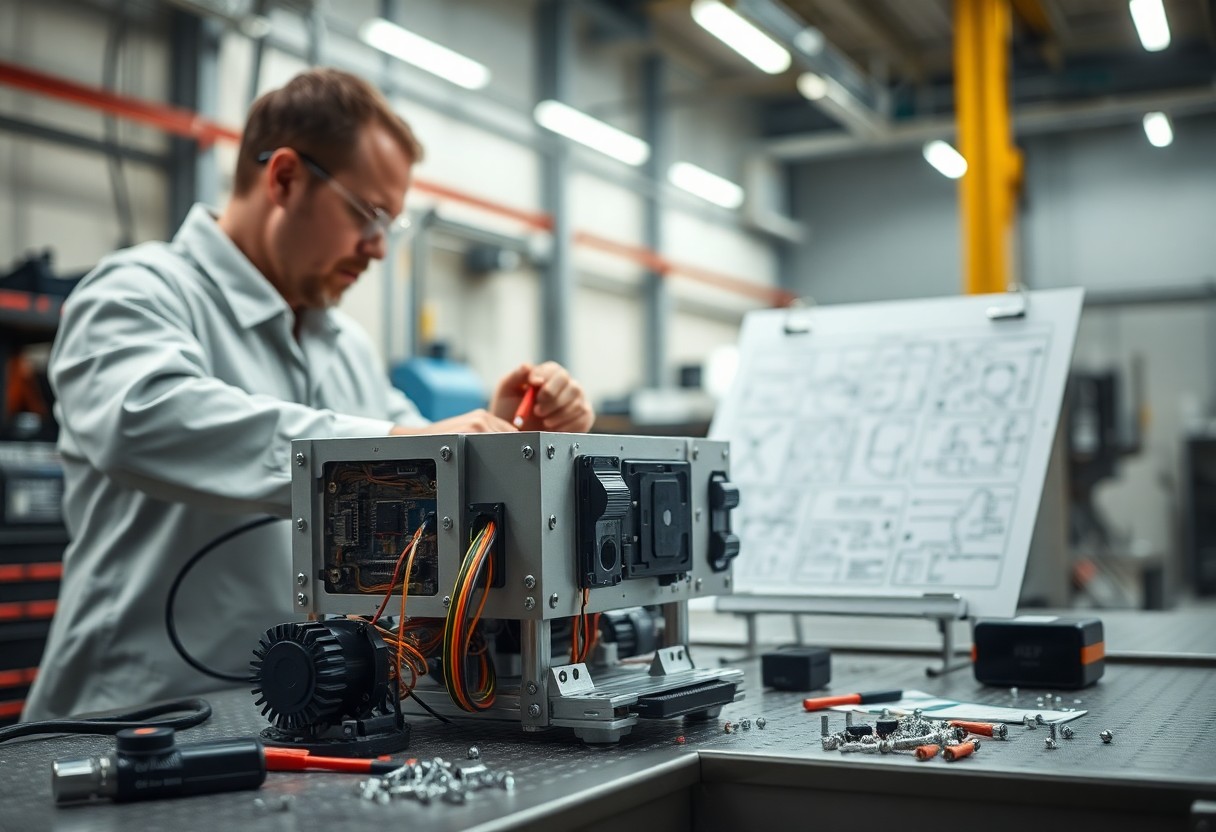
Constructing a Robot with Modular Components
There’s a clear path you can follow to assemble modular robot parts, selecting compatible actuators, sensors, and controllers, testing interfaces, and iterating designs to build reliable, maintainable robots that adapt to evolving tasks. Architectural Principles of Modular Robotics You design module hierarchies that isolate power, sensing, and actuation so teams work independently and failures are […]
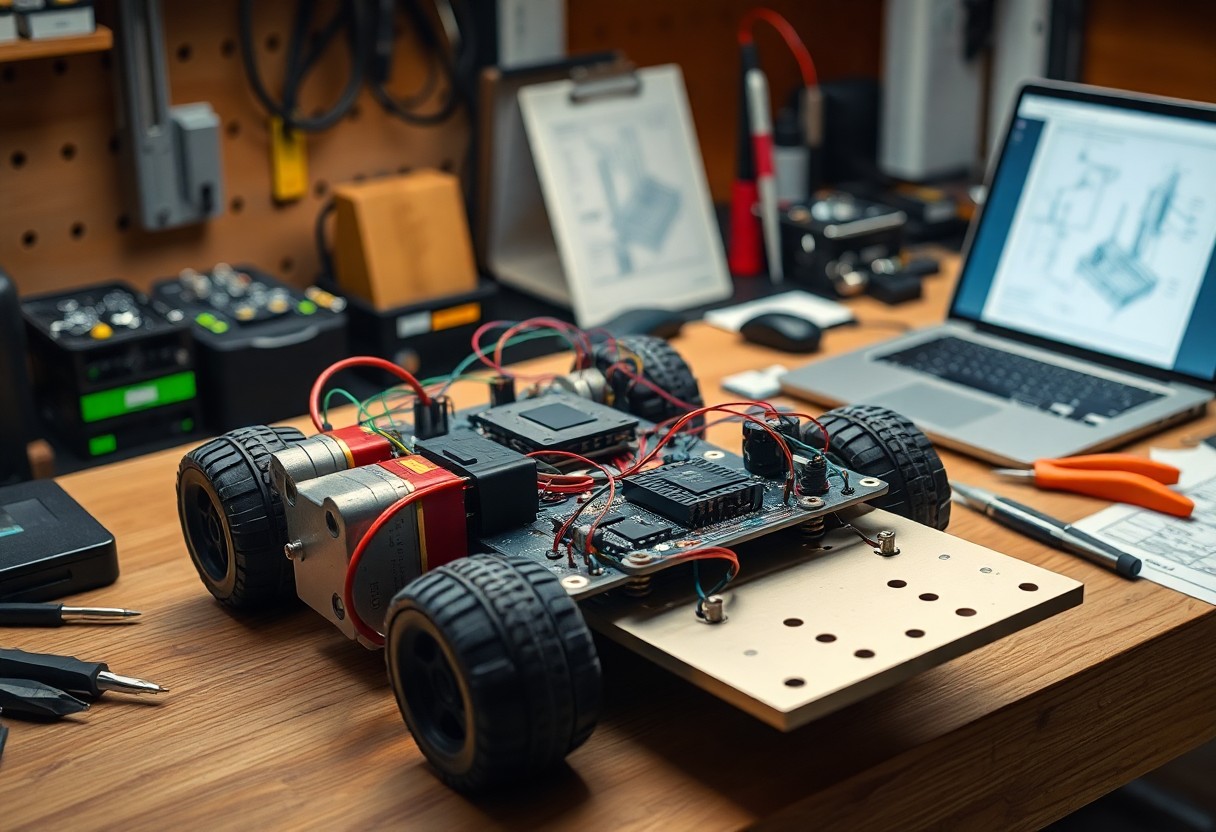
Step-by-Step Guide to Building a Custom Robot Platform
Most projects succeed when you follow clear steps: this guide shows you how to design the chassis, choose motors and controllers, integrate sensors, and test motion to build a reliable custom robot platform. Classification of Robotic Platform Types Platform categories help you weigh mobility, payload, control complexity and environment for your build, enabling targeted component […]
Constructing Robots for Continuous Operation
It’s your task to design robots for nonstop service by ensuring reliable power systems, modular maintenance access, redundant sensors, and fault-tolerant control so you can maintain uptime, schedule predictive repairs, and optimize long-term performance in demanding environments. Energy Storage and Power Management Power architecture must prioritize predictable runtime, thermal handling, and scalable capacity so you […]

Environmental Protection – Dust, Water, and Shock Resistance
Protection from dust, water, and shock helps you maintain equipment reliability, extend service life, and meet safety requirements in demanding environments. Understanding Ingress Protection (IP) Ratings IP classifications tell you how devices resist solids and liquids under standardized tests, helping you choose gear rated for job conditions. You can read two digits: the first for […]

Building Redundancy into Robotic Systems
You design systems with redundant sensors, parallel controllers, and independent power paths to sustain operation during failures, applying fault-detection algorithms and graceful degradation to preserve mission objectives. Hardware Redundancy and Mechanical Over-Actuation You distribute extra actuators and parallel load paths so the robot maintains motion after component failure, enabling graceful degradation and controlled fallback without […]

Testing Procedures for Newly Constructed Robots
Just follow systematic functional, safety, and performance tests to verify your robot’s sensors, actuators, control algorithms, and fail-safes before deployment. Mechanical Integrity and Structural Analysis Inspect the robot’s frame for microfractures, weld defects, and material fatigue using visual, ultrasonic, and radiographic methods so you verify structural soundness before functional testing. Load Bearing and Stress Capacity […]

Constructing Autonomous Robots – Navigation and Control
Just use sensor fusion, SLAM-based mapping, precise localization, path planning, and closed-loop control so your robot follows safe routes, avoids obstacles, and adapts to changing environments. Sensor Integration and Perception Sensors must be harmonized so you can interpret conflicting streams, aligning timestamps, compensating for drift, and prioritizing data quality to keep perception reliable in varied […]

Prototyping Techniques for Robot Construction
There’s a toolkit of prototyping techniques for robot construction that lets you rapidly test mechanics, iterate control systems, validate sensors, and shorten development cycles with physical mockups, 3D-printed parts, simulation, and modular electronics. Rapid Mechanical Fabrication You combine quick frame milling, modular joints, and low-cost printed fixtures to validate kinematics, load paths, and basic function […]