
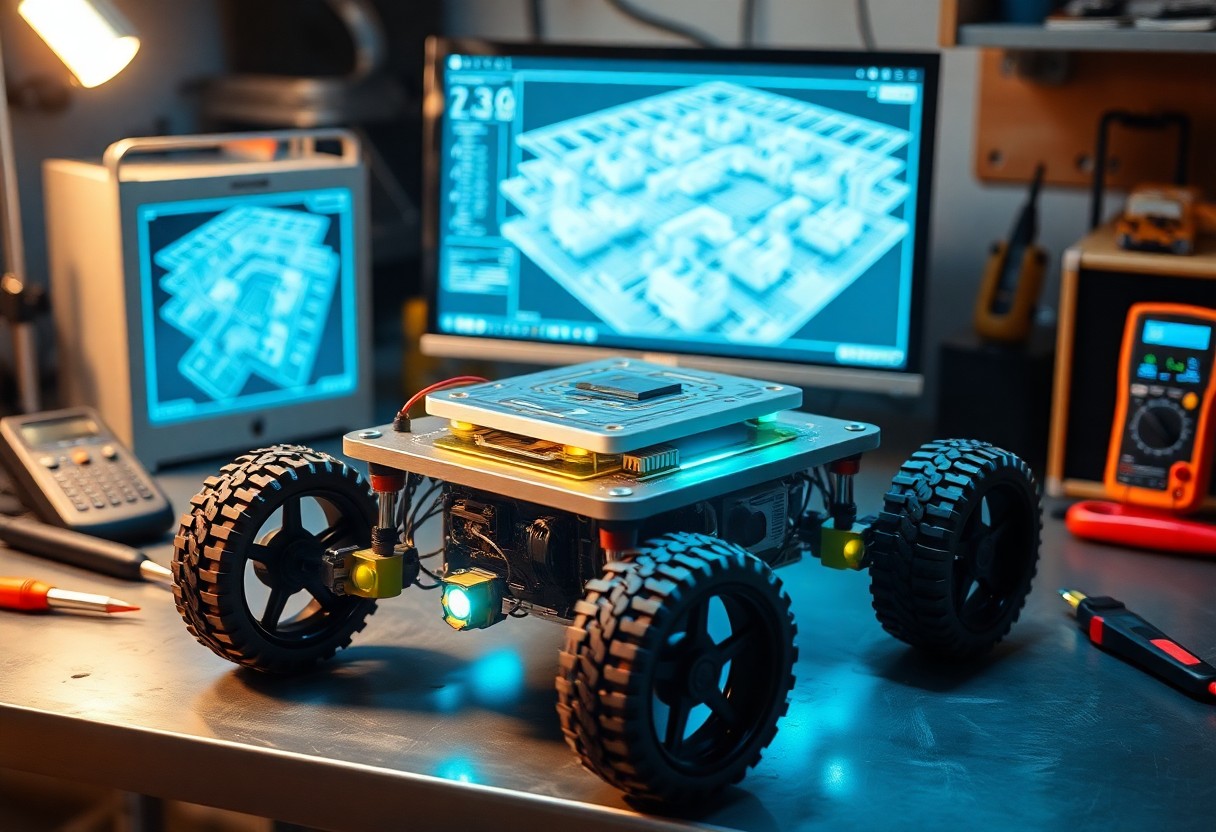
Just define sensor choices, SLAM algorithms, chassis, and power requirements so you can design and build an autonomous mapping robot that produces accurate maps, maintains localization, and operates safely during field testing. Hardware Architecture and Component Selection Your hardware design balances processing, power, and payload constraints; choose a modular chassis, scalable compute (embedded GPU or […]
Tag: design
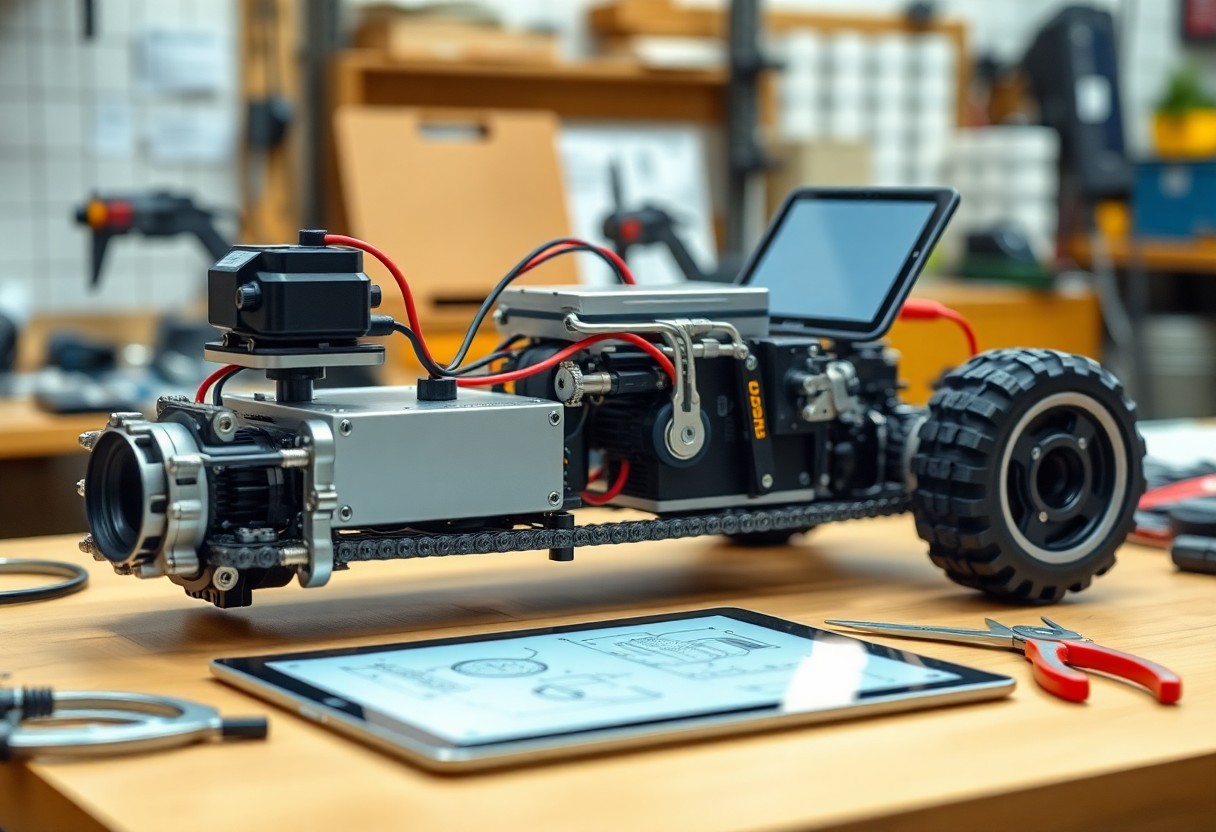
How to Design and Build a Robot Drive System
There’s a step-by-step method you can follow to design and build a robot drive system that selects motors, gear ratios, chassis layout, and controllers to meet required speed, torque, and handling while ensuring reliable integration and testing. Evaluating Drive Configurations for Specific Environments Terrain dictates your drivetrain choice; you must weigh traction, maneuverability, clearance, and […]
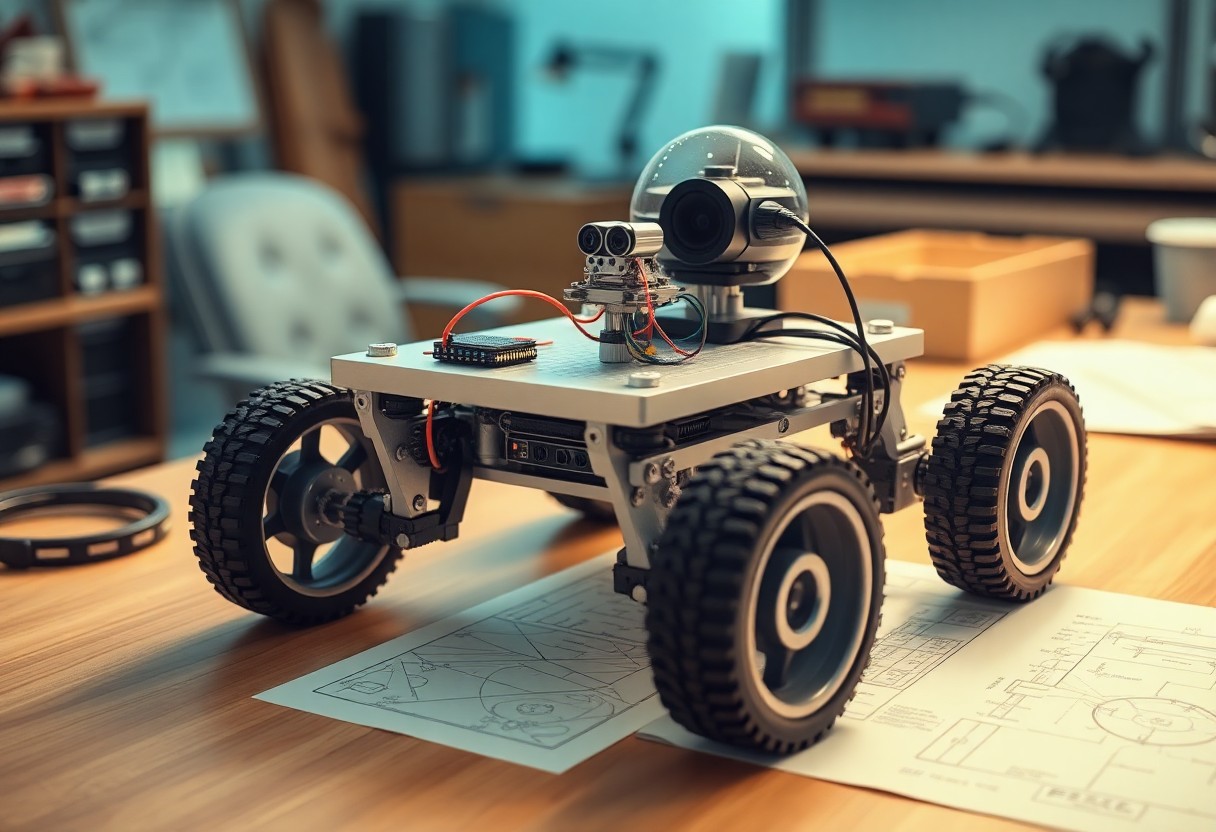
Constructing a Mobile Robot – Key Design Principles
Most mobile robot projects ask you to balance power, sensing, locomotion, control, and materials while meeting weight and cost constraints. You should prioritize clear requirements, modular architecture, and testing to ensure predictable behavior in varied environments. Mechanical Architecture and Locomotion Mechanical layout sets wheelbase, center of gravity, and articulation; you should optimize placement for stability, […]

Design for Manufacturability in Robotics
There’s clear benefit when you adopt manufacturability-focused design: you lower costs, simplify assembly, improve yield, and accelerate time-to-market for robotic systems by selecting standard components, minimizing part count, and designing for repeatable processes. Core Principles of Robotic DfM You should focus on reducing part count, standardizing interfaces, and designing tolerances for predictable assembly so manufacturing […]

Designing Robots for Easy Maintenance and Repair
It’s imperative you design modular access panels, standardized fasteners, clear diagnostics, and accessible components so you can quickly troubleshoot, replace parts, and minimize downtime without compromising safety. Principles of Modular Architecture Modularity lets you replace or upgrade entire robot sections quickly by using uniform connection points, reducing diagnostic time and simplifying spare inventories. Standardization of […]

Building Robots for Indoor vs. Outdoor Environments
Most projects you build for indoor environments prioritize precision and safety while outdoor designs demand weatherproofing and guard against hazards such as terrain and exposure, so you adjust sensors, mobility and power. Structural Design and Locomotion Structure dictates trade-offs: for indoor robots you favor compact frames, quiet actuators, and precision, while outdoor systems require greater […]
What Astonishing Materials Will Transform Your Robot Design?
Just when you thought you had a solid grasp on robot design, a new wave of materials is set to revolutionize your approach. As you explore into this exciting realm, you’ll discover how innovative substances like flexible composites, bio-inspired polymers, and smart alloys can enhance your creations’ functionality, durability, and efficiency. This blog post will […]