
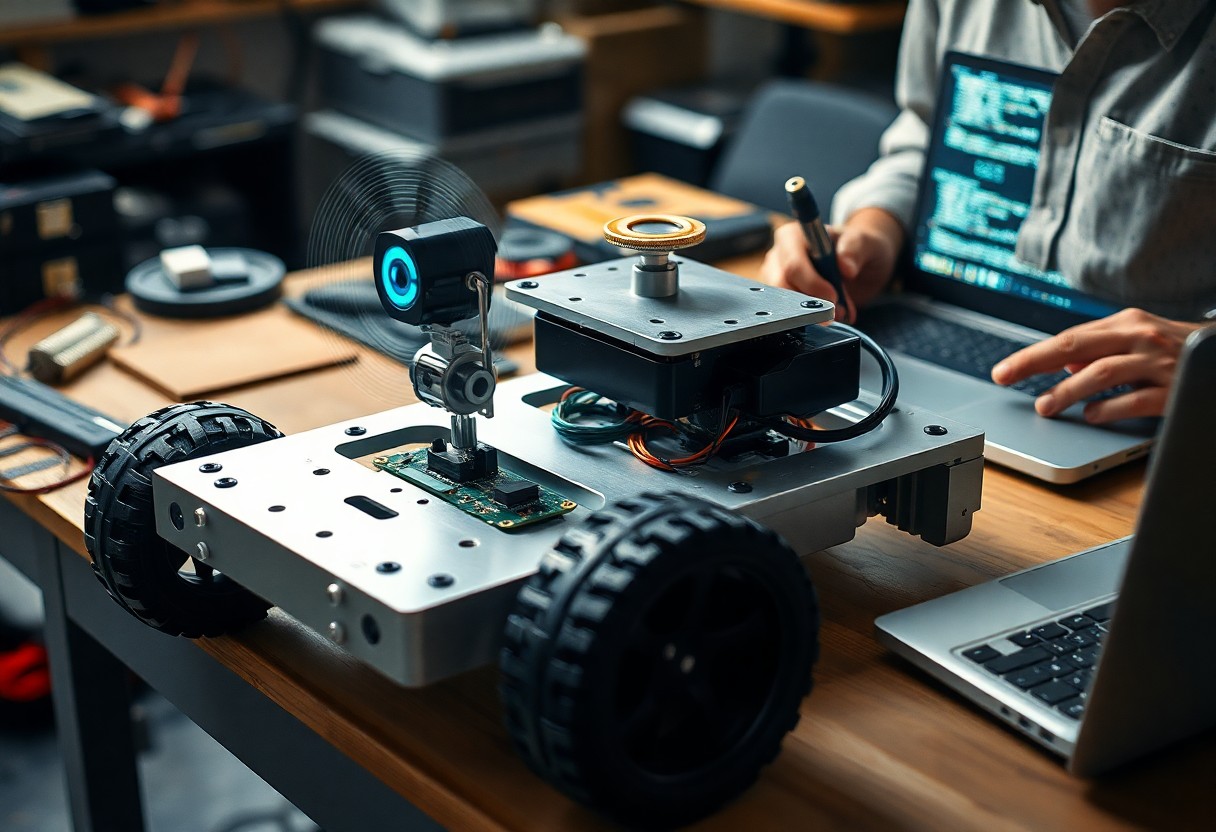
Over this concise guide, you will learn sensor selection, control design, perception integration, and testing methods to build an autonomous robot that reliably maps and avoids obstacles. Hardware Selection and Mechanical Design Select components that match sensor payload, computation, and mounting constraints so you can swap parts during testing and iterate quickly. Chassis Configuration and […]
Tag: navigation

Mobile Manipulation – Combining Navigation and Dexterous Handling
There’s a growing demand for systems that integrate mobile navigation with dexterous manipulation so you can deploy robots that perceive environments, plan paths, and execute delicate object handling in unstructured settings; this post guides your understanding of sensor fusion, motion planning, compliant control, and system architectures that enable reliable, adaptable mobile manipulation for real-world tasks. […]

Robot Navigation Advances – From GPS-Free Mapping to Adaptive Mobility
Navigation technology is evolving rapidly, transforming how robots perceive and interact with their environments. You’ll discover how advancements such as GPS-free mapping and adaptive mobility capabilities enhance the versatility and efficiency of robots. These innovations pave the way for applications across industries, ensuring robots can operate effectively in complex settings without reliance on traditional positioning […]
How Do Autonomous Navigation Systems Empower Your Home-Made Robot?
Autonomous navigation systems are transforming how you build and operate your home-made robot, offering enhanced capabilities that make your projects more viable and functional. By leveraging these advanced technologies, you can enable your robot to understand its surroundings, follow paths, and avoid obstacles with remarkable precision. This blog post will guide you through the various […]