
Control begins the moment your robot moves exactly as intended, not just roughly in the right direction. You design each component to respond with accuracy, using motors, encoders, and feedback loops that minimize error. Your choices in hardware and control algorithms determine how reliably your robot performs complex tasks. The Framework of the Machine Your […]
Tag: Control
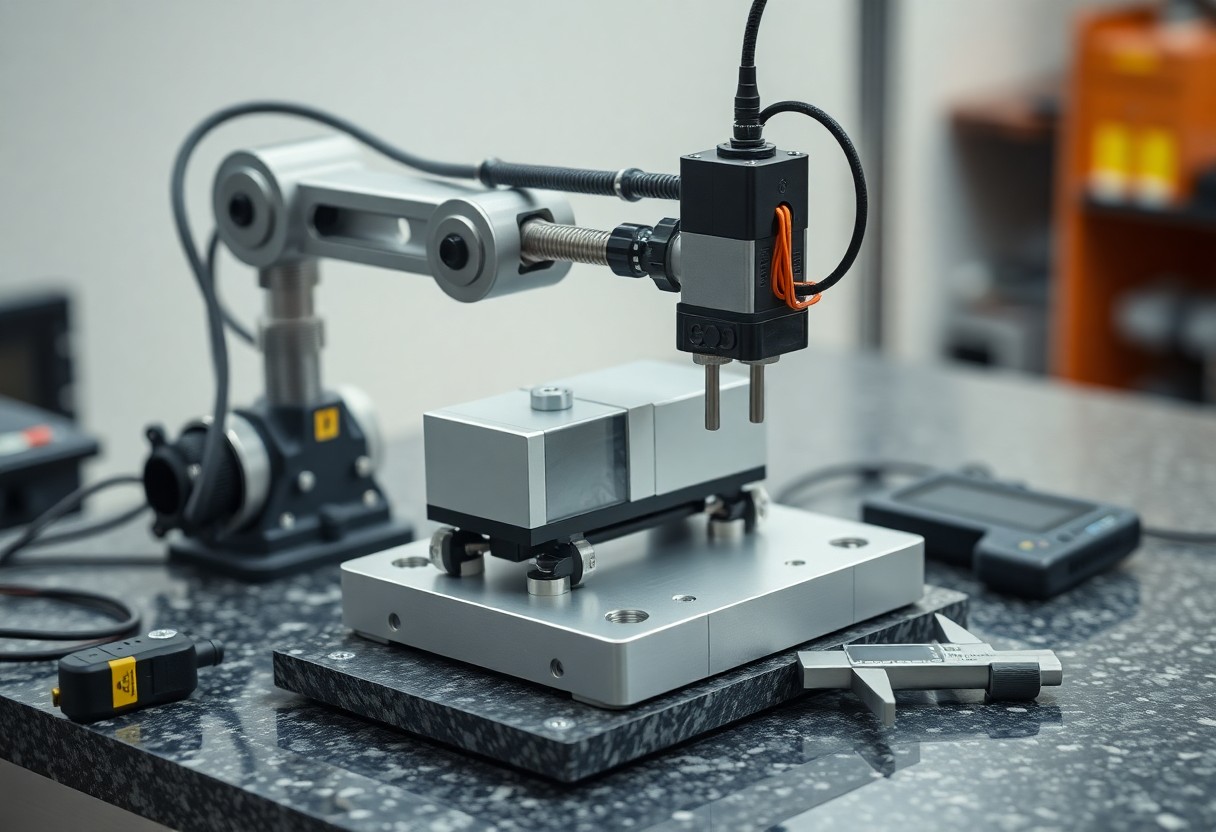
Building a Robot with Real-Time Control Systems
With real-time scheduling and tight sensor-actuator integration, you learn to design deterministic control loops, handle interrupts, and verify timing to guarantee safe, reliable robot behavior. Hardware Architecture for Real-Time Performance Hardware choices determine latency and determinism; you should partition compute, I/O, and power to meet deadlines, using dedicated processors for safety-critical loops and real-time OS […]

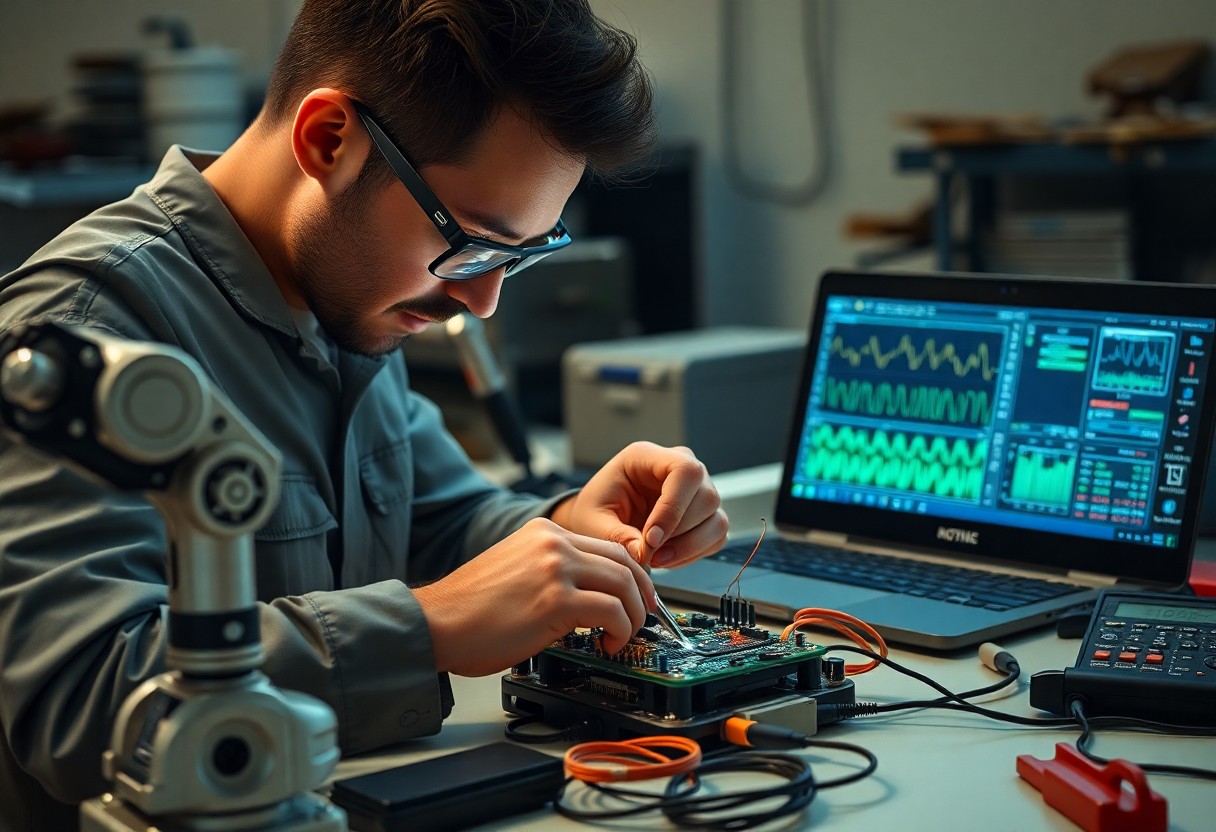
Constructing Autonomous Robots – Navigation and Control
Just use sensor fusion, SLAM-based mapping, precise localization, path planning, and closed-loop control so your robot follows safe routes, avoids obstacles, and adapts to changing environments. Sensor Integration and Perception Sensors must be harmonized so you can interpret conflicting streams, aligning timestamps, compensating for drift, and prioritizing data quality to keep perception reliable in varied […]