
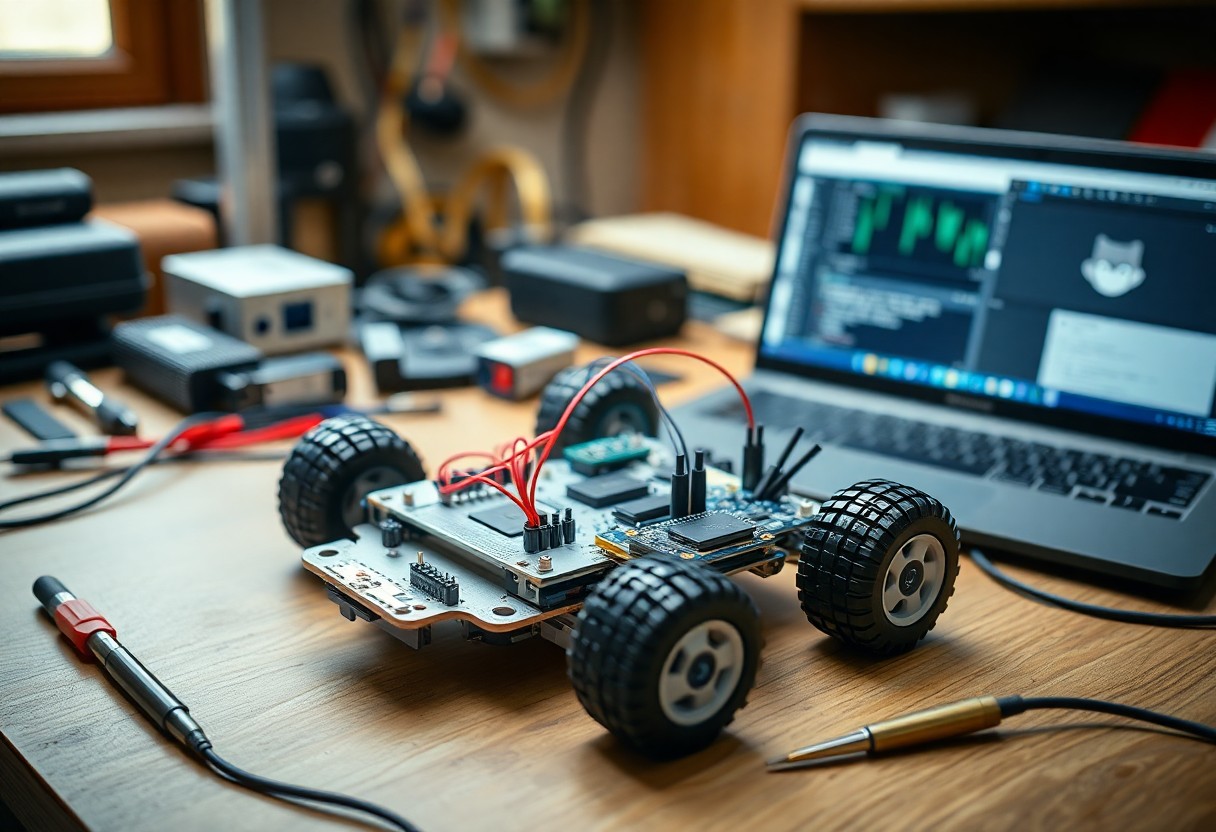
There’s a straightforward way to build your own robot using open-source hardware. You can access affordable, customizable components and detailed schematics online. With basic tools and clear instructions, you assemble, program, and test your robot efficiently. This guide walks you through each step with precision and clarity. Selecting the Right Open-Source Platform Choosing the right […]
Tag: Hardware
Building a Robot with Expandable Hardware Architecture
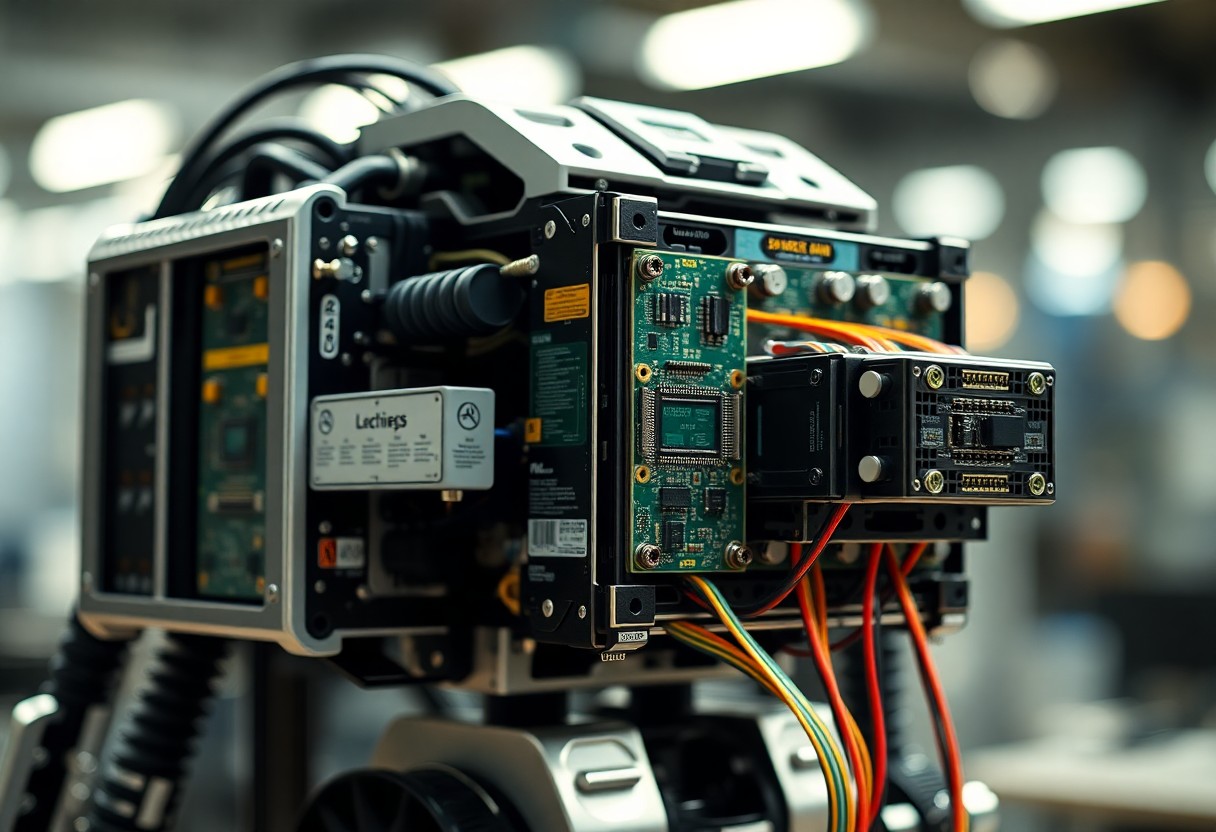
It’s wise to design modular interfaces, standardized mounts, and flexible power and communication buses so you can add sensors, actuators, and controllers without redesigning the core chassis. Core System Backbone and Power Distribution Backbone systems should prioritize scalable bus architectures and centralized power management so you can expand modules without rework. Plan high-current traces, common […]
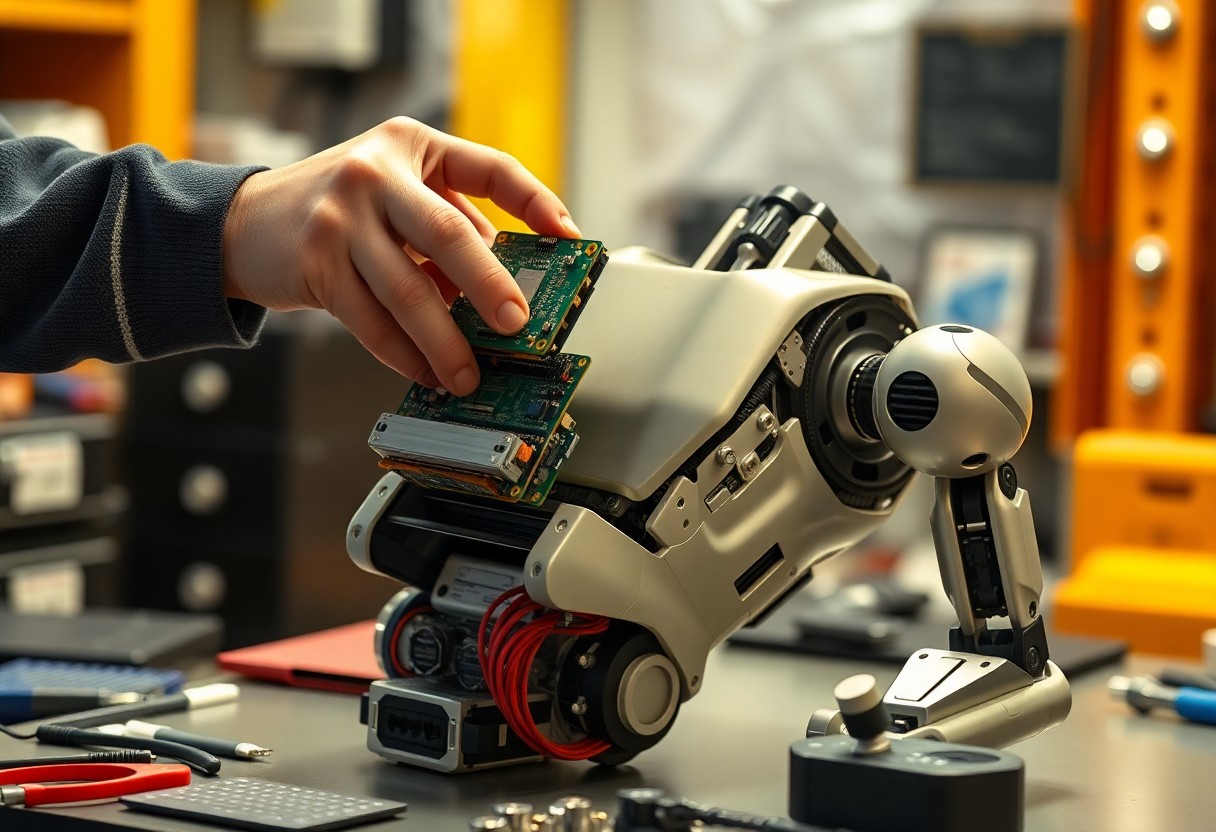
Building a Robot with Swappable Hardware Modules
You will learn practical steps to design, assemble, and test a modular robot platform, including electrical interfaces, mounting standards, and firmware strategies to mix-and-match sensors and actuators for rapid prototyping. Core Architectural Principles for Modularity Design your robot around clear module boundaries, uniform mechanical and electrical interfaces, and versioned APIs so you can swap subsystems […]