

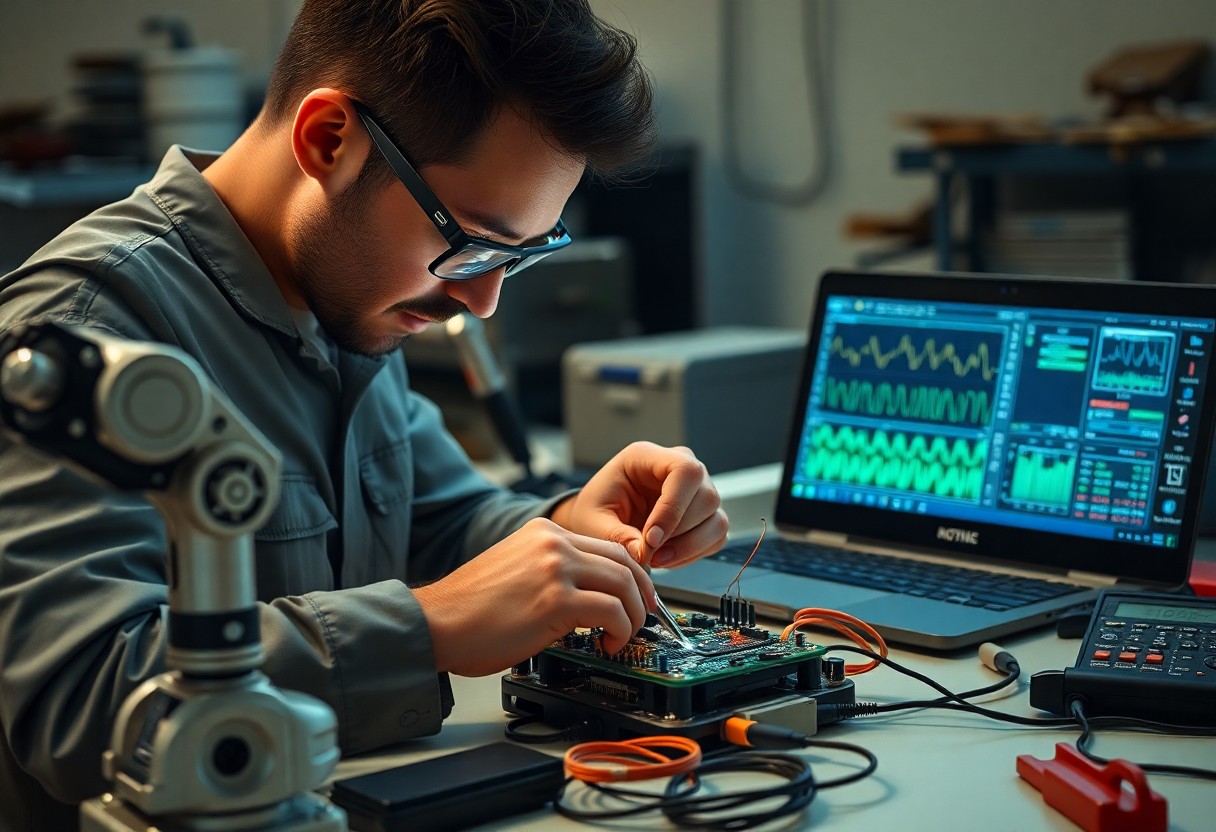
Human feedback shapes how machines adapt and improve over time. You can build a robot that interprets gestures, voice commands, or corrections to refine its actions. By integrating learning algorithms with real-time input, you create systems that grow more accurate and responsive through direct interaction, transforming how robots understand and assist in everyday tasks. The […]
Category: Robotic

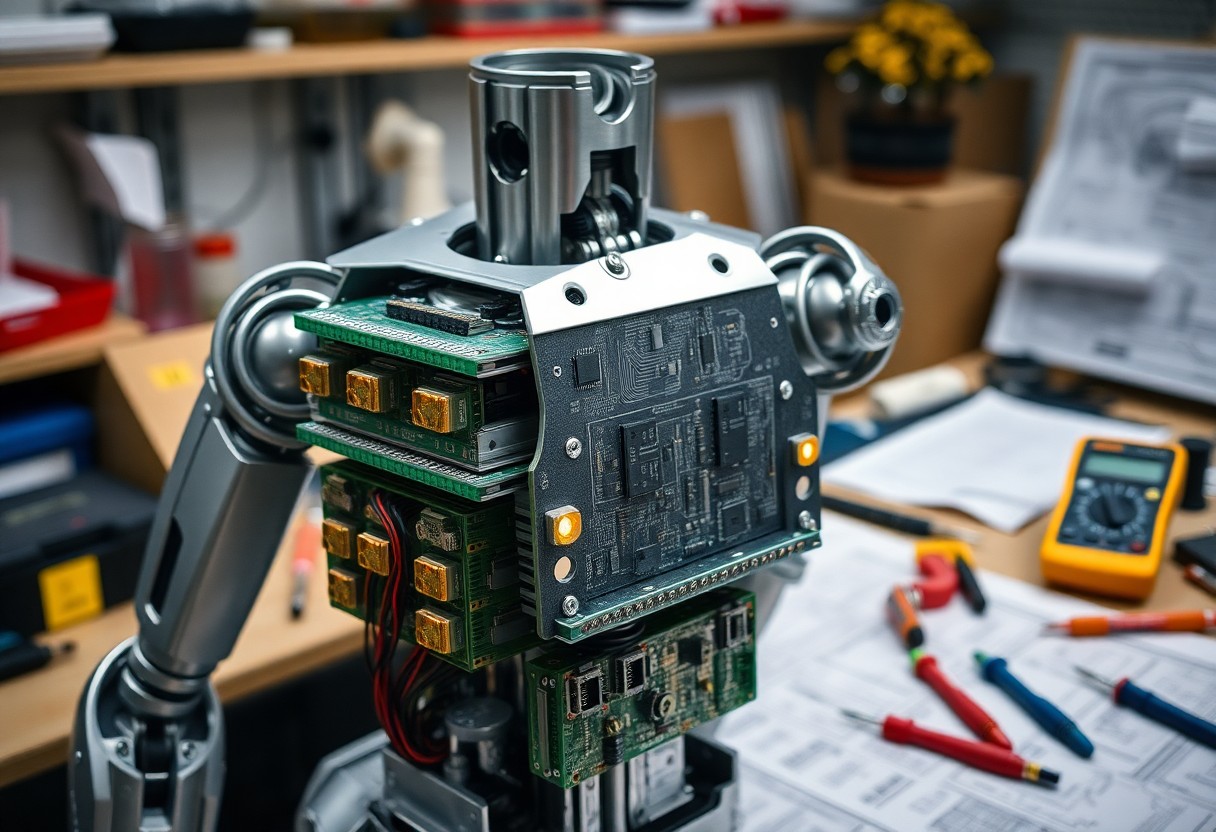
Building a Smart Robot with AI and Computer Vision
With advances in artificial intelligence and computer vision, you can now build a smart robot that perceives and reacts to its environment in real time. By integrating sensors, cameras, and machine learning models, you enable your robot to identify objects, make decisions, and perform complex tasks autonomously. The Positronic Foundation You build intelligence not from […]
Constructing a Robot with Modular Electronics Architecture
Most builders use modular electronics so you can isolate sensors, actuators, and controllers, swap components, test subsystems, and scale functionality without redesigning the entire robot. Foundations of Modular System Design Modularity lets you split control, power, and sensing into discrete boards and connectors so upgrades and repairs target single modules without reworking the entire robot. […]
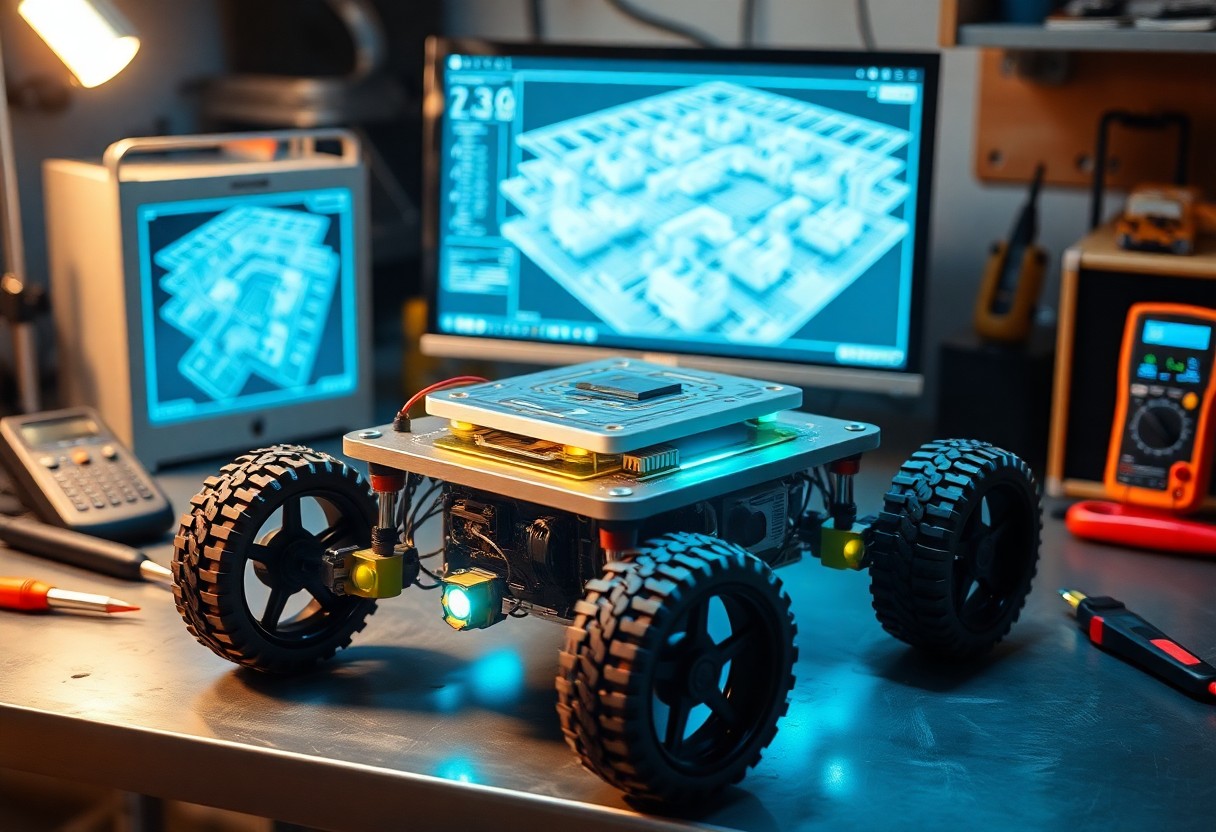
Designing and Building a Robot for Autonomous Mapping
Just define sensor choices, SLAM algorithms, chassis, and power requirements so you can design and build an autonomous mapping robot that produces accurate maps, maintains localization, and operates safely during field testing. Hardware Architecture and Component Selection Your hardware design balances processing, power, and payload constraints; choose a modular chassis, scalable compute (embedded GPU or […]
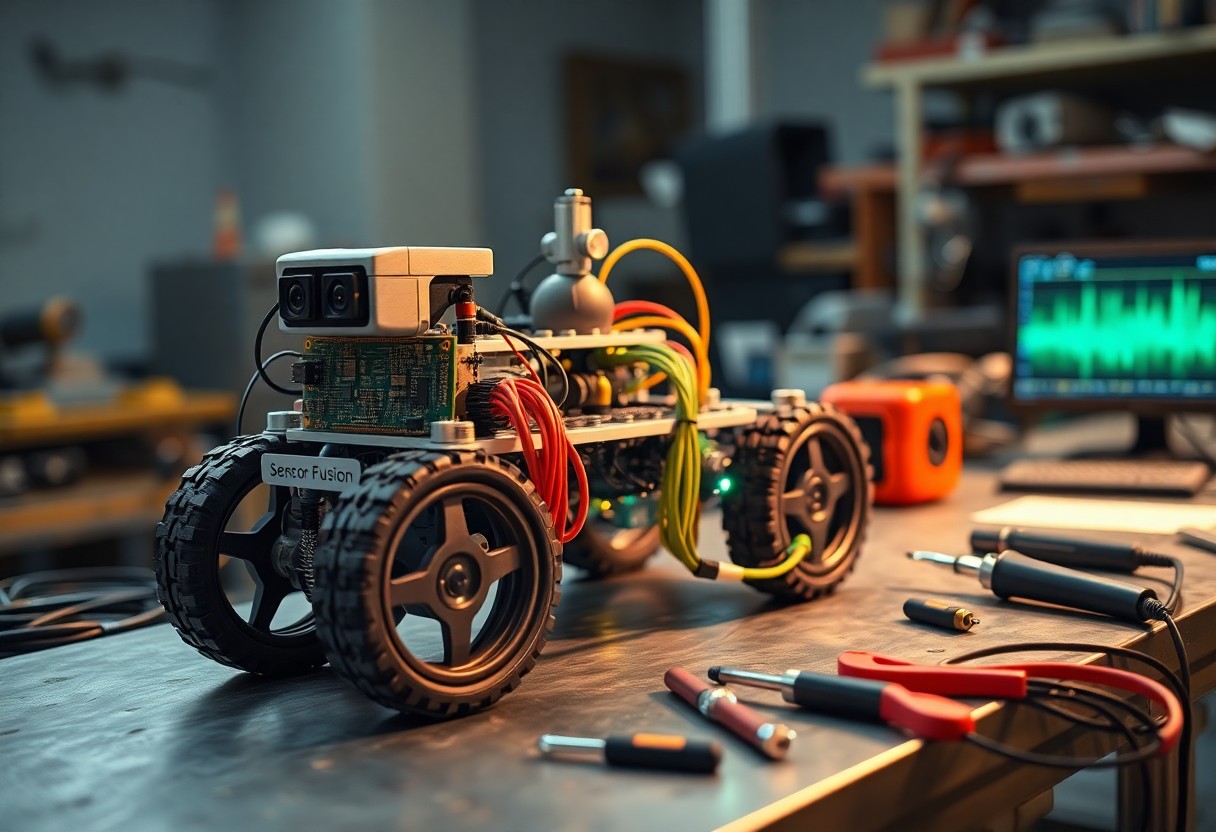
Constructing a Robot with Integrated Sensor Fusion
Just assemble sensors, microcontroller, and fusion algorithms to build a robot that synthesizes IMU, lidar, and vision data; you will learn hardware selection, calibration, sensor synchronization, and data fusion techniques to achieve reliable perception and control. Hardware Architecture and Sensor Selection Hardware choices define bus topology, power distribution, and compute placement, so you balance bandwidth, […]
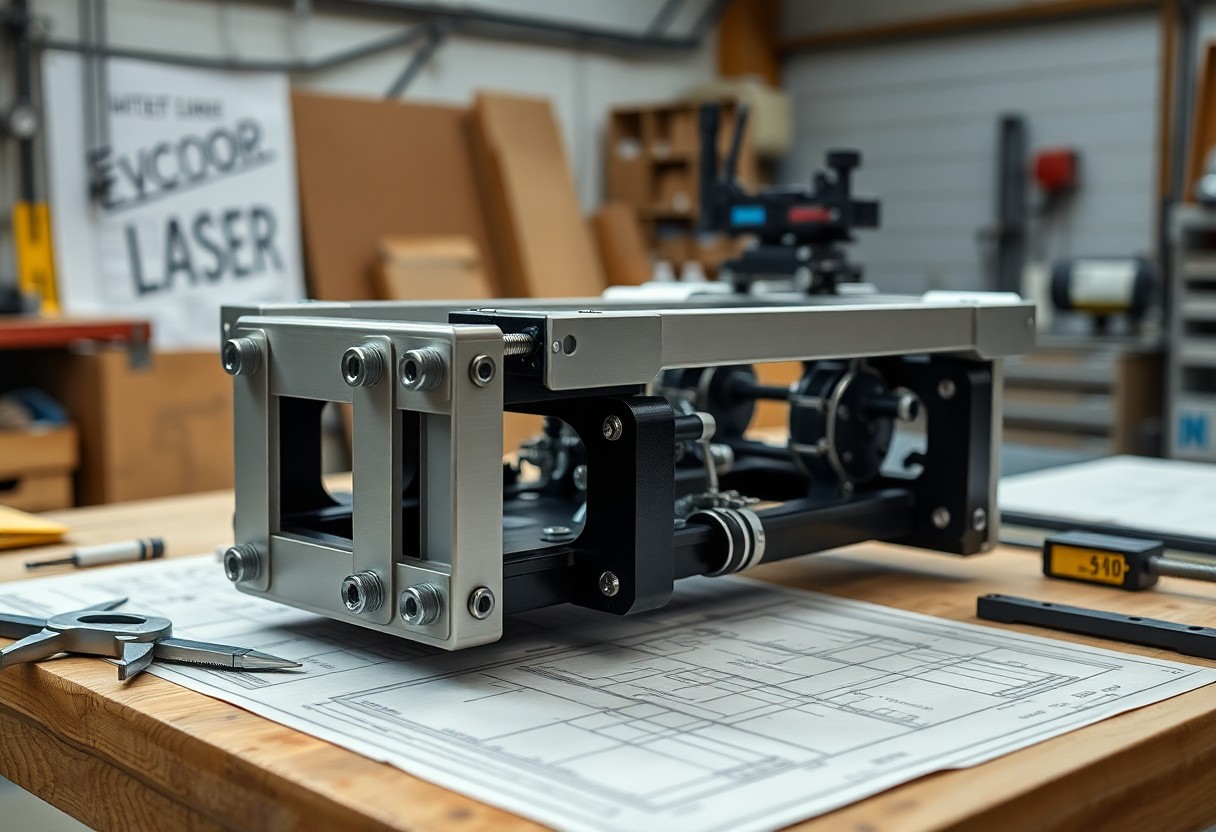
Building a Custom Robot Frame for Maximum Stability
Most designs focus on low center of gravity and wide wheelbase; you must optimize frame geometry, material choice, and mounting points to minimize tipping, control flex, and distribute mass for predictable handling across varied terrain. Material Selection for Structural Rigidity You must weigh stiffness, weight, cost, and manufacturability when choosing frame materials to ensure maximal […]

Constructing a Robot from Concept to Functional Prototype
Just follow systematic design, component selection, prototyping, and testing to transform your robot idea into a working prototype. Conceptualization and Requirements Analysis Conceptualization connects user needs to measurable goals, so you outline core functions, user scenarios, and constraints that will steer design decisions and early trade-offs. Defining Operational Objectives and Constraints Objectives specify mission profiles, […]
Building a Robot with Real-Time Control Systems
With real-time scheduling and tight sensor-actuator integration, you learn to design deterministic control loops, handle interrupts, and verify timing to guarantee safe, reliable robot behavior. Hardware Architecture for Real-Time Performance Hardware choices determine latency and determinism; you should partition compute, I/O, and power to meet deadlines, using dedicated processors for safety-critical loops and real-time OS […]
Constructing Robots That Can Adapt to New Tasks
Just design adaptable control and learning frameworks so your robot generalizes across tasks, combining modular hardware, meta-learning algorithms, and online adaptation to update policies on the fly. Cognitive Architectures for Adaptive Control Architectures integrate perception, memory, and planning so you can reconfigure behavior across tasks with minimal retraining and maintain consistent performance. Neural Network Foundations […]

Constructing a Robot for Exploration and Field Work
With clear objectives and practical constraints, you design a field-ready robot that balances mobility, power management, sensing, and rugged construction, and you plan components, test systems, and ensure reliable performance in remote environments. Design Philosophy and Structural Engineering You prioritize load paths, redundancy, and serviceability in structural engineering so field repairs are straightforward and failure […]