

Over the past decade, humanoid robotics has moved from research labs to accessible DIY projects. You can build your own functional prototype by selecting the right frame materials, integrating servo motors for joint movement, programming basic locomotion, and using sensors for environmental awareness. This guide walks you through each step with precision and clarity. Assessing […]
Tag: robot

Constructing a Robot with Autonomous Decision-Making
AI enables robots to assess environments and act independently. You design such systems by integrating sensors, processing units, and decision algorithms. You teach machines to interpret data and respond in real time. Your robot learns from inputs and adjusts behavior without human intervention. You build intelligence through code, hardware, and iterative testing. The Positronic Architecture […]

Building a Multi-Purpose Robot for Everyday Tasks
Just imagine a robot that handles chores, assists with errands, and adapts to your daily needs. You can design such a system by integrating modular hardware, responsive sensors, and intuitive software. This guide walks you through the practical steps to build a functional, multi-purpose robot that simplifies everyday life. The Physical Framework Your robot’s durability […]
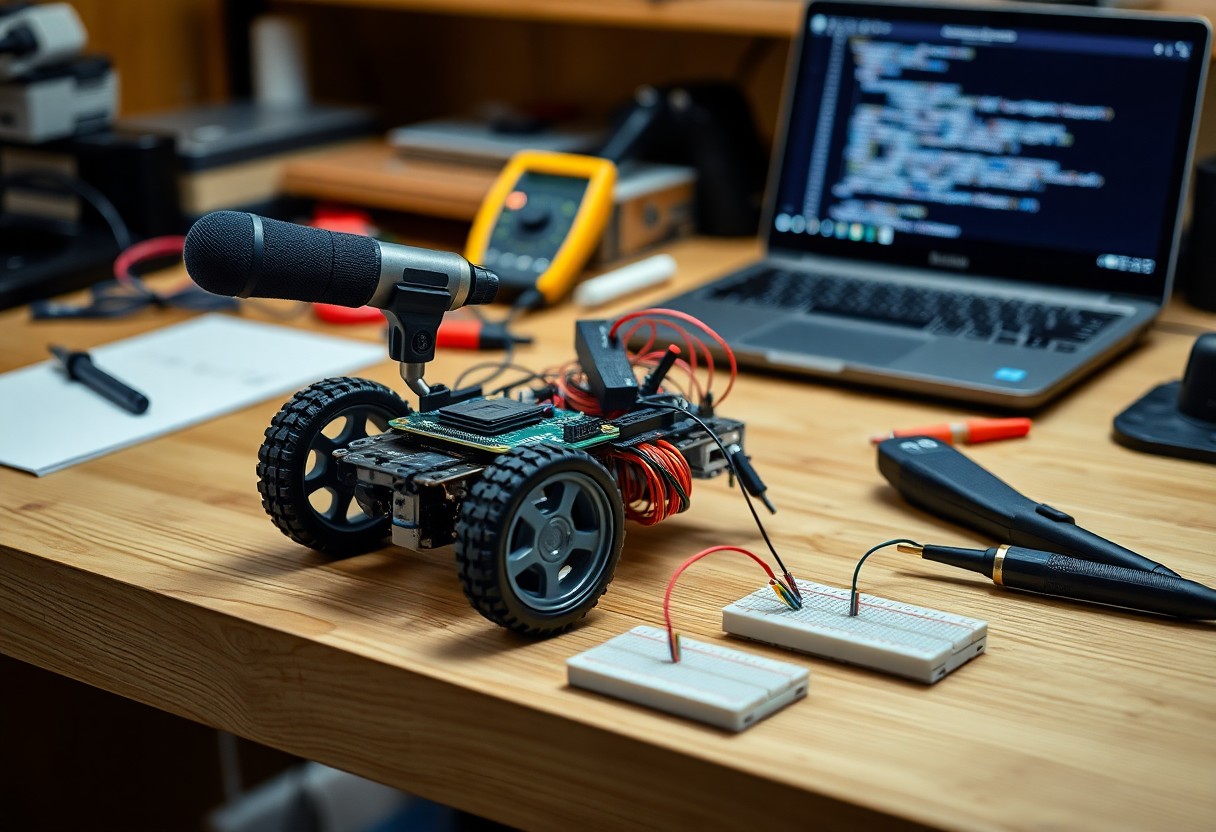
How to Build a Voice-Controlled Robot at Home
This guide shows you how to build a voice-controlled robot at home using affordable, easy-to-find components. You’ll learn to connect a microcontroller, motor driver, and microphone module, then program the system to respond to spoken commands. With clear steps and no prior robotics experience required, you’ll have a working voice-activated robot in hours. Assessing Core […]

Constructing a Robot That Learns from Human Input
Human feedback shapes how machines adapt and improve over time. You can build a robot that interprets gestures, voice commands, or corrections to refine its actions. By integrating learning algorithms with real-time input, you create systems that grow more accurate and responsive through direct interaction, transforming how robots understand and assist in everyday tasks. The […]
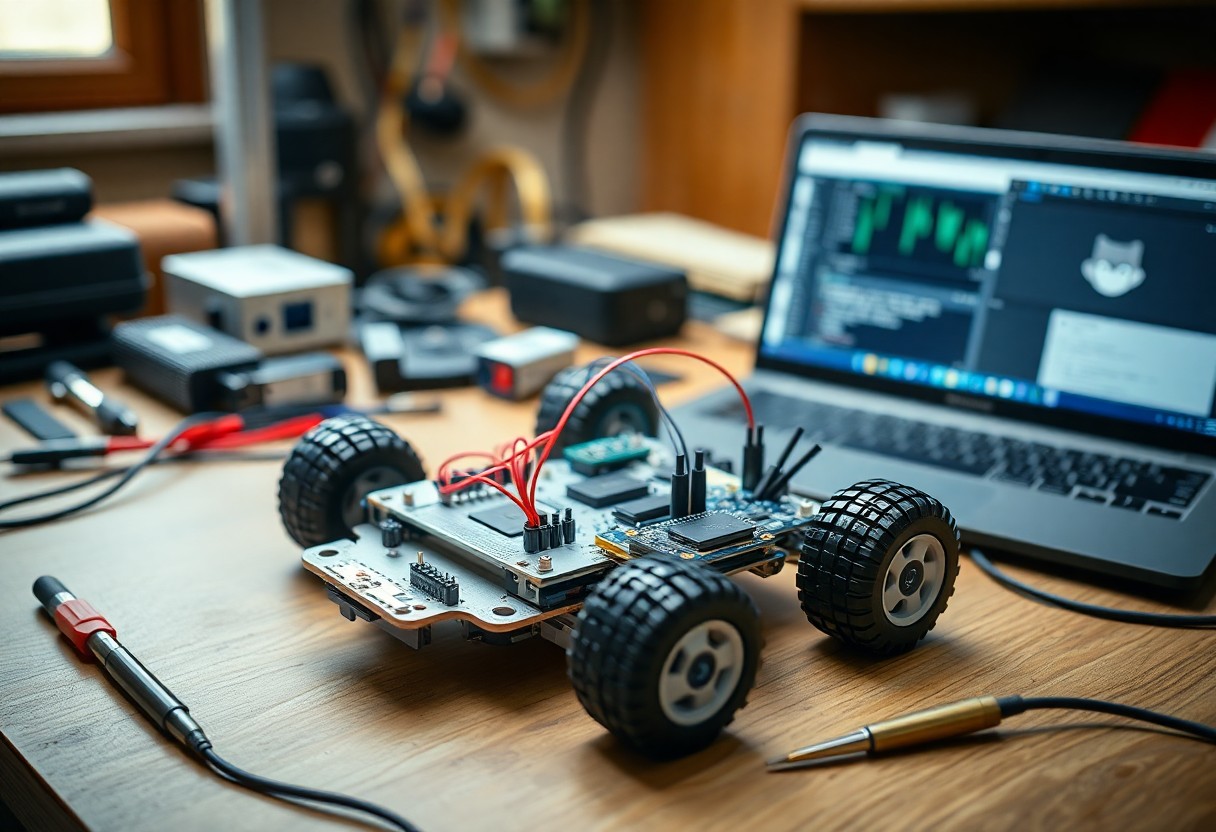
How to Construct a Robot Using Open-Source Hardware
There’s a straightforward way to build your own robot using open-source hardware. You can access affordable, customizable components and detailed schematics online. With basic tools and clear instructions, you assemble, program, and test your robot efficiently. This guide walks you through each step with precision and clarity. Selecting the Right Open-Source Platform Choosing the right […]
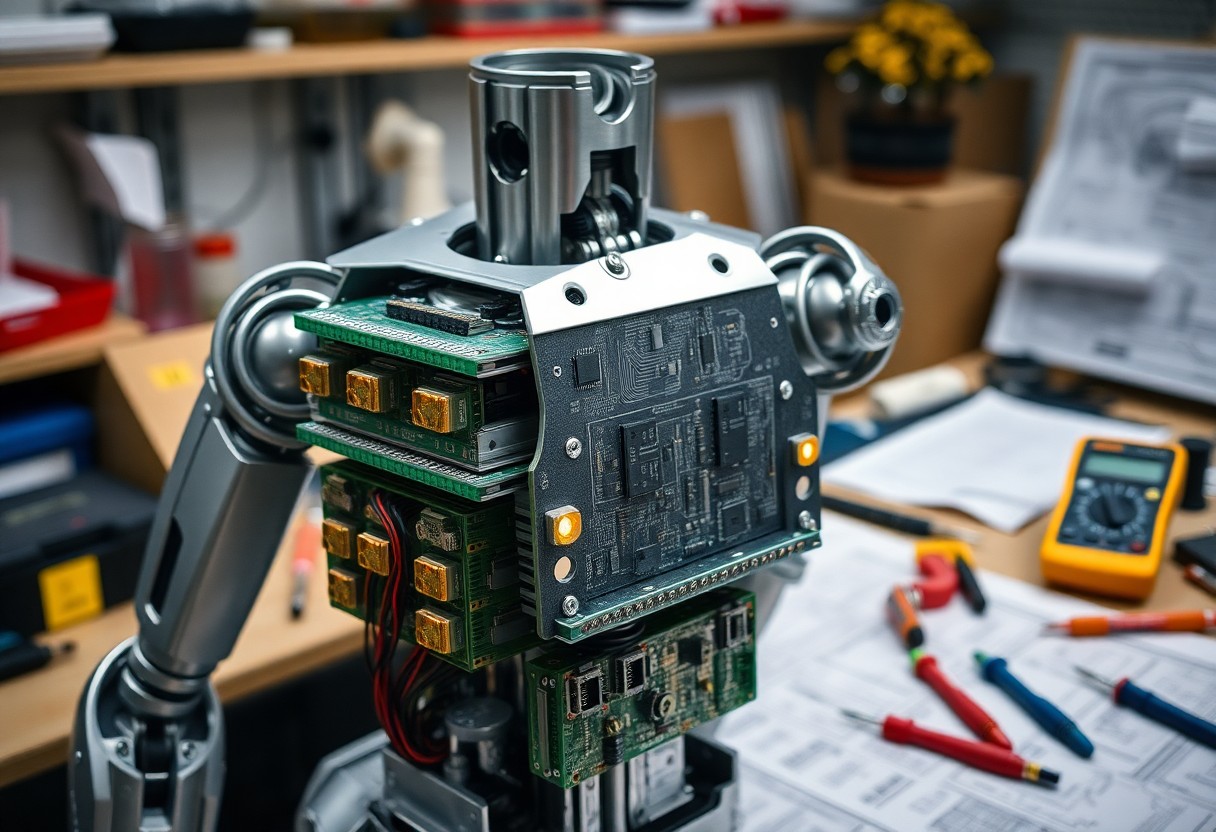
Constructing a Robot with Modular Electronics Architecture
Most builders use modular electronics so you can isolate sensors, actuators, and controllers, swap components, test subsystems, and scale functionality without redesigning the entire robot. Foundations of Modular System Design Modularity lets you split control, power, and sensing into discrete boards and connectors so upgrades and repairs target single modules without reworking the entire robot. […]
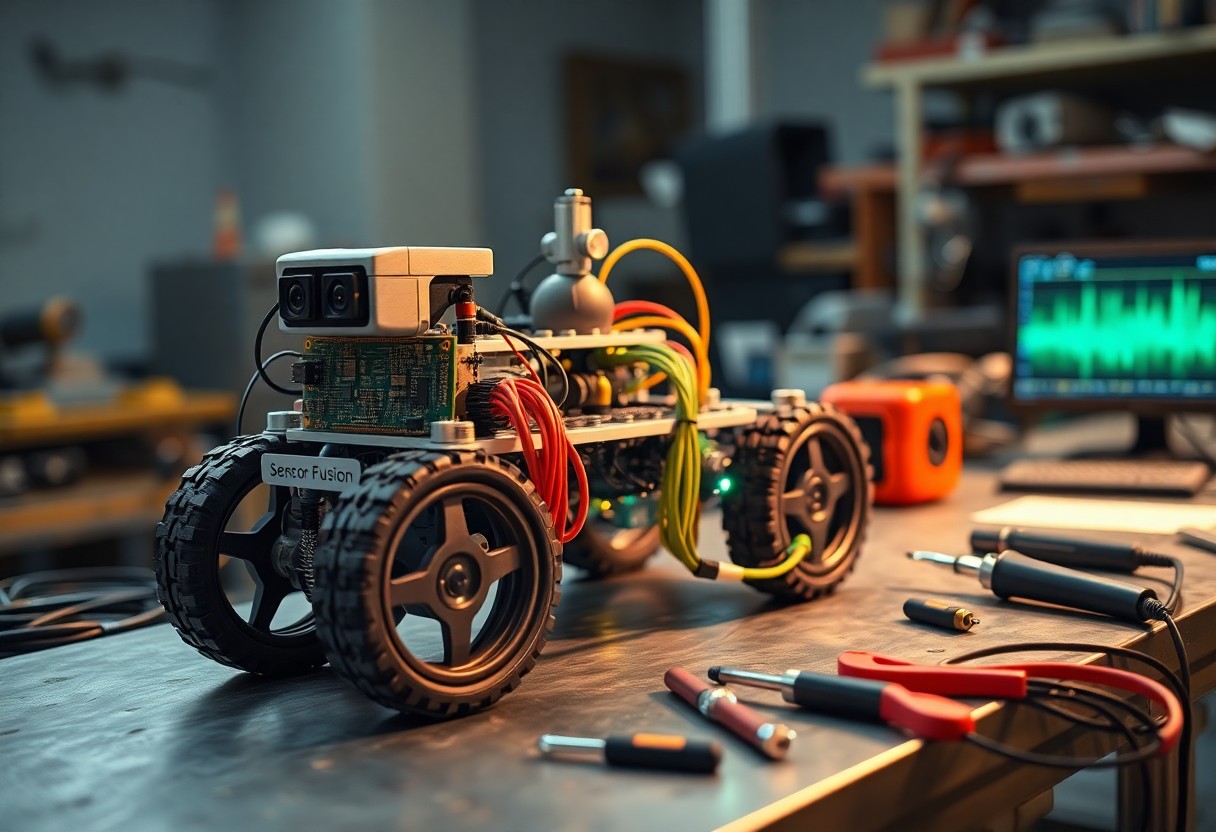
Constructing a Robot with Integrated Sensor Fusion
Just assemble sensors, microcontroller, and fusion algorithms to build a robot that synthesizes IMU, lidar, and vision data; you will learn hardware selection, calibration, sensor synchronization, and data fusion techniques to achieve reliable perception and control. Hardware Architecture and Sensor Selection Hardware choices define bus topology, power distribution, and compute placement, so you balance bandwidth, […]
Building a Custom Robot Frame for Maximum Stability
Most designs focus on low center of gravity and wide wheelbase; you must optimize frame geometry, material choice, and mounting points to minimize tipping, control flex, and distribute mass for predictable handling across varied terrain. Material Selection for Structural Rigidity You must weigh stiffness, weight, cost, and manufacturability when choosing frame materials to ensure maximal […]

Constructing a Robot from Concept to Functional Prototype
Just follow systematic design, component selection, prototyping, and testing to transform your robot idea into a working prototype. Conceptualization and Requirements Analysis Conceptualization connects user needs to measurable goals, so you outline core functions, user scenarios, and constraints that will steer design decisions and early trade-offs. Defining Operational Objectives and Constraints Objectives specify mission profiles, […]