
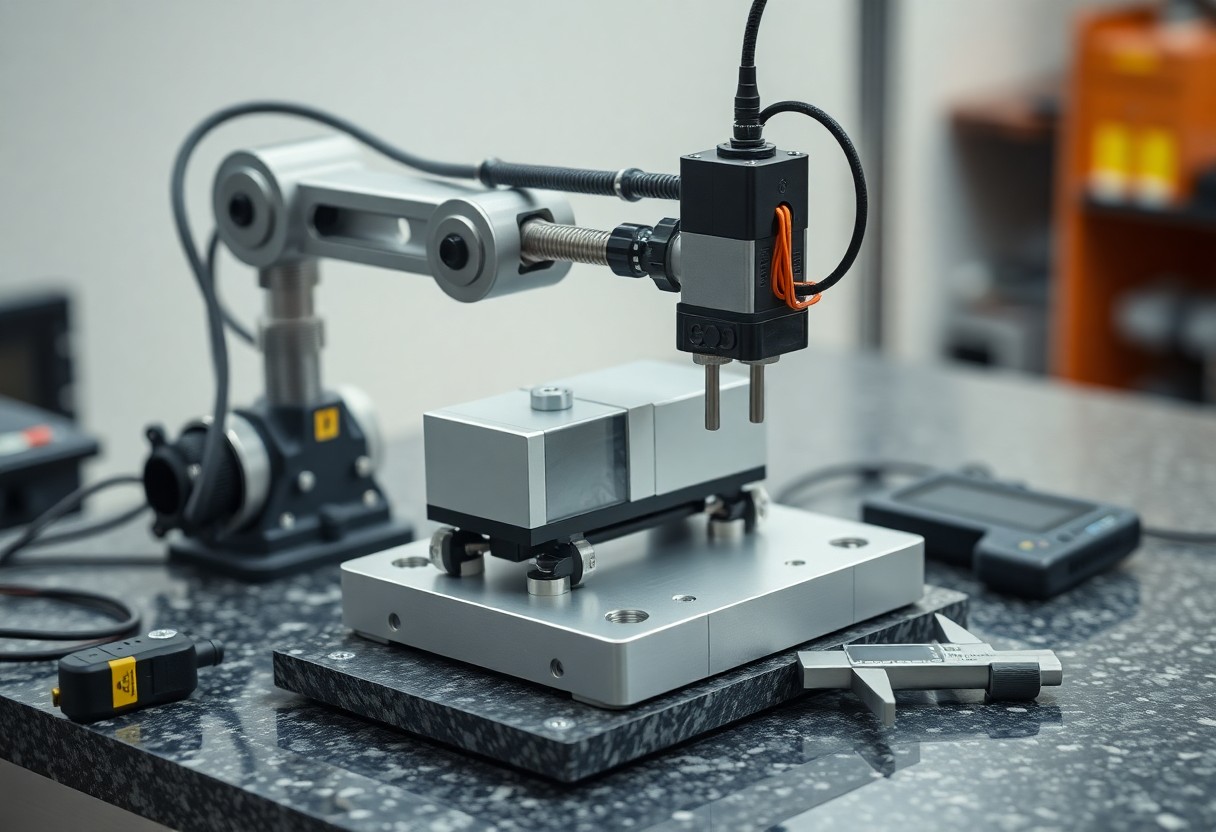
Control begins the moment your robot moves exactly as intended, not just roughly in the right direction. You design each component to respond with accuracy, using motors, encoders, and feedback loops that minimize error. Your choices in hardware and control algorithms determine how reliably your robot performs complex tasks. The Framework of the Machine Your […]
Category: Uncategorized

Constructing Autonomous Robots for Everyday Applications
Just imagine robots moving through your home, handling chores, or guiding elderly family members with precision and care. You’re already seeing early versions in vacuums and lawn mowers, but today’s engineering advances allow you to build systems that perceive, decide, and act independently in real-world settings using sensors, AI, and modular design. The First Principles […]
Constructing Robots with Scalable Modular Architectures
Architecture defines how components integrate and evolve in robotic systems. You design scalable modular robots by standardizing interfaces, enabling plug-and-play functionality across configurations. This approach simplifies upgrades, repairs, and adaptation to new tasks. You gain flexibility without sacrificing performance, making modular design a practical foundation for next-generation robotics. The Modular Premise You design systems where […]
How to Build a Robot That Interacts with Humans Naturally
Robot interaction begins with understanding human cues. You design sensors to detect speech, facial expressions, and gestures. You integrate natural language processing and machine learning to interpret intent. You refine responses through real-world feedback. Your robot learns to respond in ways that feel intuitive, building trust and clarity in everyday environments. Identifying Key Factors for […]

Constructing a Robot with Autonomous Mapping Capabilities
Many robotics enthusiasts aim to build machines that perceive and move through environments without human guidance. You can construct a robot with autonomous mapping capabilities using sensors like LiDAR or depth cameras, paired with SLAM algorithms. This guide walks you through the core components, software frameworks, and integration steps to bring your intelligent robot to […]
How to Build a Robot for Smart Home Integration
Integration of robotics into your home starts with understanding how devices communicate. You choose components that support common protocols like Wi-Fi or Zigbee. You design the robot’s function around tasks such as monitoring or object transport. You program it to respond to voice commands or sensor input. You test connectivity with existing smart systems to […]
Constructing DIY Robots with AI-Powered Automation
AI enables you to build functional robots at home using accessible tools and smart programming. You can integrate sensors, microcontrollers, and machine learning models to create machines that learn and adapt. This guide shows you how to design, assemble, and automate your own intelligent robots with practical, step-by-step methods. The Silicon Cerebrum Your robot’s intelligence […]

Building a Robot That Can Operate in Extreme Conditions
Most extreme environments demand robots built beyond standard limits. You face intense heat, freezing cold, radiation, or crushing pressure. Success means selecting materials, power sources, and sensors engineered to endure. Every component must perform reliably where humans cannot survive. This is how you build a robot for the planet’s harshest places. The Architecture of Endurance […]

Building a DIY Robot with Advanced Sensor Fusion
Most hobbyists underestimate how accessible advanced robotics has become. You can now build a DIY robot that combines multiple sensors to perceive its environment intelligently. This guide walks you through selecting components, integrating sensor data, and programming autonomous behavior-all with affordable, off-the-shelf parts. The Mechanical Foundation Your robot’s performance begins with a well-designed mechanical base. […]

Constructing a Robot Capable of Object Recognition
Construction of a robot capable of object recognition begins with integrating sensors, processing units, and machine learning models. You select cameras and depth sensors to capture visual data, then process it using trained neural networks to identify objects. Proper calibration and iterative testing ensure accuracy and responsiveness in real-world environments. The Mechanical Foundation Your robot […]